Решение.
Для решения задачи используем закон сохранения энергии. Потенциальная энергия переходит в кинетическую энергию. Кинетическая энергия состоит из энергии поступательного движения и энергии вращательного движения.
[ mcdot gcdot h=frac{mcdot {{upsilon }^{2}}}{2}+frac{Jcdot {{omega }^{2}}}{2} (1). ]
m – масса сплошного цилиндра, h – высота с которой спускается тело (см. рис.), υ – линейная скорость тела в конце спуска, J – момент инерции сплошного цилиндра, ω – угловая скорость вращения тела.
В конце спуска угловая скорость связана с линейной скоростью:
[ omega =frac{upsilon }{R} (2). ]
Определим скорость центра масс поступательного движения сплошного цилиндра. Момент инерции сплошного цилиндра определяется как момент инерции диска по формуле:
[ J=frac{mcdot {{R}^{2}}}{2} (3). ]
Подставим (3) и (2) в (1):
[ begin{align}
& mcdot gcdot h=frac{mcdot {{upsilon }^{2}}}{2}+frac{mcdot {{R}^{2}}cdot {{upsilon }^{2}}}{4cdot {{R}^{2}}}, gcdot h=frac{mcdot {{upsilon }^{2}}}{2}+frac{mcdot {{upsilon }^{2}}}{4}, gcdot h=frac{3cdot mcdot {{upsilon }^{2}}}{4}, \
& {{upsilon }^{2}}=frac{4cdot gcdot h}{3}, upsilon =sqrt{frac{4cdot gcdot h}{3}} (4). \
end{align} ]
υ = 1,63 м/с.
2021-02-12 ![]()
На шероховатой доске на расстоянии $l$ от ее конца находится сплошной цилиндр (рис.). Доску начинают двигать с ускорением $vec{a}_{0}$ влево. С какой скоростью относительно доски будет двигаться центр масс цилиндра в тот момент, когда он будет находиться над краем доски? Движение цилиндра относительно доски происходит без скольжения.

Решение:

Введем неинерциальную систему координат OXY, связанную с доской. В неинерциальной системе координат OXY к цилиндру необходимо приложить силу инерции $m vec{a}_{0}$, $m$ — масса цилиндра.
Рассчитаем работу силы инерции на перемещении $l$: $A_{ин} = ma_{0}l$
По закону сохранения энергии для цилиндра:
$E_{кин} = A_{ин}$
$E_{кин} = ma_{0}l$. (1)
$E_{кин}$ — кинетическая энергия цилиндра в момент, когда он находится под краем доски
$E_{кин} = E_{пост} + E_{вр} = frac{mv^{2} }{2} + frac{I omega^{2} }{2}$ (2)
$v$ — скорость центра масс цилиндра в системе координат, т.е. скорость центра масс цилиндра относительно доски.
$omega = frac{v}{R}$ — угловая скорость вращения цилиндра
$I = frac{mR^{2} }{2}$ — момент инерции цилиндра.
Из (1) и (2) получаем:
$frac{mv^{2} }{2} + frac{1}{2} frac{mR^{2} }{2} frac{v^{2} }{R^{2} } = ma_{0}l$
$frac{mv^{2} }{2} + frac{mv^{2} }{4} = ma_{0};$
$frac{3}{4}v^{2} = a_{0}l; v^{2} = frac{4a_{0} l}{3}; v = 2 sqrt{ frac{a_{0}l }{3} }$.
Определение центра масс, теория и онлайн калькуляторы
Определение центра масс
При исследовании поведения систем частиц, часто удобно использовать для описания движения такую точку, которая характеризует положение и движение рассматриваемой системы как единого целого. Такой точкой служит центр масс.
Для однородных тел обладающих симметрией центр масс часто совпадает с геометрическим центром тела. В однородном изотропном теле одной выделенной точке найдется симметричная ей точка.
Радиус-вектор и координаты центра масс
Предположим, что у нас имеются две частицы с равными массами, им соответствуют радиус-векторы: ${overline{r}}_1 и {overline{r}}_2$ . В этом случае центр масс расположен посередине между частицами. Центр масс (точка C) определён радиус-вектором ${overline{r}}_C$ (рис.1).
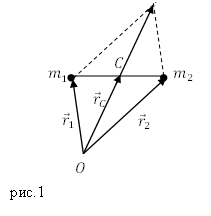
Из рис.1 видно, что:
[{overline{r}}_C=frac{{overline{r}}_1+ {overline{r}}_2}{2}left(1right).]
Можно ожидать, что вместе с геометрическим центром системы радиус-вектор, которого равен ${overline{r}}_C,$ играет роль точка, положение которой определяет распределение массы. Ее определяют так, чтобы вклад каждой частицы был пропорционален ее массе:
[{overline{r}}_C=frac{{overline{r}}_1m_1+ {overline{r}}_2m_2}{m_1+m_2}left(2right).]
Радиус -вектор ${overline{r}}_C$, определенный выражением (2) — средне взвешенная величина радиус-векторов частиц ${overline{r}}_1$ и ${overline{r}}_2$. Это становится очевидным, если формулу (2) представить в виде:
[{overline{r}}_C=frac{m_1}{m_1+m_2}{overline{r}}_1+frac{m_2}{m_1+m_2}{overline{r}}_2left(3right).]
Выражение (3) показывает, что радиус-вектор каждой частицы входит в ${overline{r}}_C$ с весом, который пропорционален его массе.
Выражение (3) легко обобщается для множества материальных точек, которые расположены произвольным образом.
Если положения N материальных точек системы задано при помощи их радиус-векторов, то радиус — вектор, определяющий положение центра масс находим как:
[{overline{r}}_c=frac{sumlimits^N_{i=1}{m_i{overline{r}}_i}}{sumlimits^N_{i=1}{m_i}}left(4right).]
Выражение (4) считают определением центра масс системы.
При этом абсцисса центра масс равна:
[x_c=frac{sumlimits^N_{i=1}{m_ix_i}}{sumlimits^N_{i=1}{m_i}}left(5right).]
Ордината ($y_c$) центра масс и его аппликата ($z_c$):
[y_c=frac{sumlimits^N_{i=1}{m_iy_i}}{sumlimits^N_{i=1}{m_i}}left(6right).]
[z_c=frac{sumlimits^N_{i=1}{m_iz_i}}{sumlimits^N_{i=1}{m_i}}left(7right).]
Формулы (4-7) совпадают с формулами, которые используют для определения тяжести тела. В том случае, если размеры тела малы в сравнении с расстоянием до центра Земли, центр тяжести считают совпадающим с центром масс тела. В большинстве задач центр тяжести совпадает с центром масс тела.
Скорость центра масс
Выражение для скорости центра масс (${overline{v}}_c=frac{d{overline{r}}_c}{dt}$) запишем как:
[{overline{v}}_c=frac{m_1{overline{v}}_1+m_2{overline{v}}_2+dots +m_n{overline{v}}_n}{m_1+m_2+dots +m_n}=frac{overline{P}}{M}left(8right),]
где $overline{P}$ — суммарный импульс системы частиц; $M$ масса системы. Выражение (8) справедливо при движениях со скоростями которые существенно меньше скорости света.
Если система частиц является замкнутой, то сумма импульсов ее частей не изменяется. Следовательно, скорость центра масс при этом величина постоянная. Говорят, что центр масс замкнутой системы перемещается по инерции, то есть прямолинейно и равномерно, и это движение не зависимо от движения составных частей системы. В замкнутой системе могут действовать внутренние силы, в результате их действия части системы могут иметь ускорения. Но это не оказывает влияния на движение центра масс. Под действием внутренних сил скорость центра масс не изменяется.
Примеры задач на определение центра масс
Пример 2
Задание. Система составлена из материальных точек (рис.2), запишите координаты ее центра масс?
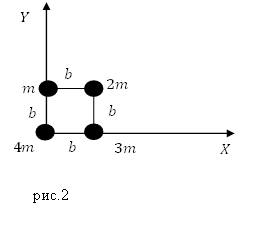
Решение. Рассмотрим рис.2. Центр масс системы лежит на плоскости, значит, у него две координаты ($x_c,y_c$). Найдем их используя формулы:
[left{ begin{array}{c}
x_c=frac{sumlimits_i{Delta m_ix_i}}{m};; \
y_с=frac{sumlimits_i{Delta m_iy_i}}{m}. end{array}
right.]
Вычислим массу рассматриваемой системы точек:
[m=m+2m+3m+4m=10 m.]
Тогда абсцисса центра масс $x_{c } $равна:
[x_c=frac{0cdot 4m+3mcdot b+2mcdot b}{10m}=0,5 b.]
Ордината $y_с$:
[y_с=frac{0cdot m+mcdot b+2mcdot b}{10m}=0,3 b.]
Ответ. $x_c=0,5 b$; $y_с=0,3 b$
Пример 2
Задание. Космонавт, имеющий массу $m$, неподвижен относительно корабля массы $M$. Двигатель космического аппарата выключен. Человек начинает подтягиваться к кораблю при помощи легкого троса. Какое расстояние пройдет космонавт ($s_1$), какое корабль ($s_2$) до точки встречи? В начальный момент расстояние между ними равно $s$.
Решение. Центр масс корабля и космонавта лежит на прямой, соединяющей эти объекты.
В космосе, где внешние силы отсутствуют, центр масс замкнутой системы (корабль-космонавт) либо покоится, либо движется с постоянной скоростью. В избранной нами (инерциальной) системе отсчета он покоится. При этом:
[frac{s_1}{s_2}=frac{m_2}{m_1}left(2.1right).]
По условию:
[s=s_1+s_2left(2.2right).]
Из уравнений (2.1) и (2.2) получаем:
[s_1=sfrac{m_2}{m_1+m_2};; s_2=sfrac{m_1}{m_1+m_2}.]
Ответ. $s_1=sfrac{m_2}{m_1+m_2};; s_2=sfrac{m_1}{m_1+m_2}$
Читать дальше: период и частота колебаний.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
поделиться знаниями или
запомнить страничку
- Все категории
-
экономические
43,662 -
гуманитарные
33,654 -
юридические
17,917 -
школьный раздел
611,978 -
разное
16,905
Популярное на сайте:
Как быстро выучить стихотворение наизусть? Запоминание стихов является стандартным заданием во многих школах.
Как научится читать по диагонали? Скорость чтения зависит от скорости восприятия каждого отдельного слова в тексте.
Как быстро и эффективно исправить почерк? Люди часто предполагают, что каллиграфия и почерк являются синонимами, но это не так.
Как научится говорить грамотно и правильно? Общение на хорошем, уверенном и естественном русском языке является достижимой целью.
Содержание:
- Динамика плоского движения твердого тела
- Дифференциальные уравнения плоского движения твердого тела
- Порядок решения задач динамики плоского движения твердого тела
- Примеры решения задач на тему: динамика плоского движения твердого тела
Плоское движение твердого тела определяют как движение, при котором скорости всех точек тела параллельны некоторой плоскости. Если с любой точкой тела (или его мысленного продолжения) связать поступательно движущуюся систему координат, то относительное движение будет чистым вращением вокруг неподвижной оси, перпендикулярной плоскости движения.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Динамика плоского движения твердого тела
Плоским движением твердого тела называется такое его движение, при котором каждая точка тела движется в плоскости, параллельной некоторой неподвижной плоскости.
Момент количества движения тела (главный момент количества движения твердого тела), вращающегося вокруг неподвижной оси, относительно этой оси равен произведению момента инерции тела относительно той же оси на угловую скорость вращения.
Дифференциальные уравнения плоского движения твердого тела
Из кинематики известно, что для определения положения твердого тела, которое совершает плоское движение, достаточно задать положение любой ее точки, которая принимается за полюс, и угол поворота вокруг мгновенной оси вращения, проходящей через полюс перпендикулярно плоскости движения.
Задачи динамики будут решаться проще всего, если за полюс выбрать центр масс  тела (рис.11.1) и определять положение тела координатами
тела (рис.11.1) и определять положение тела координатами  ,
,  и углом
и углом  .
.

Таким образом, для изучения плоского движения твердого тела достаточно составить три дифференциальных уравнения, которые связывают величины , и с внешними силами, действующими на тело.
Для определения движения центра масс используется теорема о движении центра масс системы:

где  — масса тела,
— масса тела,
 — главный вектор всех внешних сил, которые действуют на тело,
— главный вектор всех внешних сил, которые действуют на тело,
 — ускорение центра масс.
— ускорение центра масс.
Уравнение, определяющее вращательное движение тела, получается из теоремы об изменении момента количества движения относительно оси, которая проходит через точку :

где  — момент количества движения тела относительно оси, которая проходит через центр масс,
— момент количества движения тела относительно оси, которая проходит через центр масс,
 — главный момент внешних сил, которые приложены к телу.
— главный момент внешних сил, которые приложены к телу.
Проектируя уравнение (11.1) на неподвижные оси координат  , а также учитывая, что для твердого тела
, а также учитывая, что для твердого тела  , где
, где  — момент инерции тела относительно оси, которая проходит через точку , получают следующие дифференциальные уравнения плоского движения твердого тела:
— момент инерции тела относительно оси, которая проходит через точку , получают следующие дифференциальные уравнения плоского движения твердого тела:

или

С помощью этих уравнений можно решать как прямую, так и обратную задачи динамики.
При несвободном движении, когда траектория центра масс известна, уравнение движения точки удобнее составлять в проекциях на касательную  и главную нормаль
и главную нормаль  к этой траектории, переменный радиус кривизны которой
к этой траектории, переменный радиус кривизны которой  :
:

Порядок решения задач динамики плоского движения твердого тела
Выбрать неподвижную систему координат, относительно которой рассматривается движение тела.
Изобразить твердое тело в текущем положении и показать все внешние силы, которые приложены к нему.
Составить дифференциальные уравнения плоского движения твердого тела в форме уравнений (11.4).
Если известна траектория центра масс твердого тела, то удобнее применить уравнение (11.5).
В случае решения прямой задачи искомые внешние силы и их моменты определяются из систем дифференциальных уравнений (11.4) и (11.5).
В случае решения обратной задачи путем интегрирования систем (11.4) или (11,5) определяют кинематические уравнения движения центра масс твердого тела.
Примеры решения задач на тему: динамика плоского движения твердого тела
Задача №1
Однородный прямой круглый цилиндр радиусом  и массой движется на гладкой наклонной плоскости, которая составляет с горизонтом угол
и массой движется на гладкой наклонной плоскости, которая составляет с горизонтом угол  . В начальный момент времени цилиндр неподвижен.
. В начальный момент времени цилиндр неподвижен.
Определить движение цилиндра (рис. 11.2) и давление его на наклонную поверхность.

Решение. Изобразим цилиндр в среднем положении на наклонной плоскости и покажем внешние силы, которые действуют на него:  — сила тяжести цилиндра,
— сила тяжести цилиндра,  — нормальная реакция наклонной плоскости. Оси координат выбираем так, как показано на рис.11.2.
— нормальная реакция наклонной плоскости. Оси координат выбираем так, как показано на рис.11.2.
Дифференциальные уравнения плоского движения круглого цилиндра в данном случае имеют вид:


где и — координаты центра масс цилиндра.
Поскольку во время движения  , то из второго уравнения вытекает:
, то из второго уравнения вытекает:

Из третьего уравнения системы находим: 
Поскольку
 и
и 
Поскольку в начальный момент времени  , то и во время движения
, то и во время движения  . Это значит, что по гладкой поверхности цилиндр будет скользить без вращения.
. Это значит, что по гладкой поверхности цилиндр будет скользить без вращения.
Решая первое уравнение, находим закон изменения координаты .

Разделим переменные и проинтегрируем:

Отсюда

Окончательно,

Следовательно, цилиндр совершает поступательное движение.
Ответ: 
Задача № 2
Однородный круглый цилиндр с радиусом и массой (рис.11.3) движется из состояния покоя по шероховатой неподвижной наклонной плоскости, которая составляет с горизонтом угол . Коэффициент трения скольжения цилиндра по плоскости равен  .
.

Определить уравнение движения цилиндра и его давление на наклонную поверхность.
Решение. К цилиндру приложены внешние силы:  — сила тяжести цилиндра; — нормальная реакция наклонной плоскости;
— сила тяжести цилиндра; — нормальная реакция наклонной плоскости;  — сила трения о шероховатую наклонную поверхность, которая направлена в сторону, противоположную движению цилиндра. Оси координат и все силы показаны на рис.11.3.
— сила трения о шероховатую наклонную поверхность, которая направлена в сторону, противоположную движению цилиндра. Оси координат и все силы показаны на рис.11.3.
Дифференциальные уравнения движения цилиндра в этом случае запишутся в виде:

Поскольку во время движения  , то из уравнения (2) следует:
, то из уравнения (2) следует:
 или
или 
Уравнения (1) и (3) имеют три неизвестных:  и
и  . В нашем случае нельзя определять
. В нашем случае нельзя определять  , поскольку это равенство имеет место, когда точка касания скользит вдоль плоскости, а при качении, когда проскальзывание отсутствует, должно быть
, поскольку это равенство имеет место, когда точка касания скользит вдоль плоскости, а при качении, когда проскальзывание отсутствует, должно быть 
Найдем еще одно дополнительное уравнение. Поскольку точка  является мгновенным центром скоростей, то:
является мгновенным центром скоростей, то:

Тогда, с учетом уравнения (4), а также значения  , уравнения (1) и (3) приобретут вид:
, уравнения (1) и (3) приобретут вид:

Окончательно

Поскольку левые части этих уравнений одинаковы, тогда равны и их правые части. Поэтому
 или
или 
По закону Кулона
 или
или 
Итак,

откуда

Это и есть условие качения цилиндра по шероховатой поверхности без проскальзывания.
Определим ускорение центра масс цилиндра при таком качении. Для этого в уравнение (1)

подставим значение силы трения

Поскольку  то, разделяя переменные, получим
то, разделяя переменные, получим

Проинтегрируем это выражение:

Поскольку  , то, разделяя переменные и интегрируя, получим
, то, разделяя переменные и интегрируя, получим


Определим закон вращения цилиндра вокруг оси. Для этого воспользуемся уравнением (3):

Поскольку

то
 или
или 
откуда

Разделим переменные и проинтегрируем:

Закон изменения угловой скорости имеет вид:

Определим закон изменения угла вращения:
 или
или 

и тогда

Видно, что закон вращения цилиндра вокруг его оси не зависит от движения центра масс.
Ответ: 
Задача № 3
Тяжелый круглый цилиндр  с массой
с массой  и радиусом
и радиусом  обмотан посередине невесомой и нерастяжимой нитью, конец которой
обмотан посередине невесомой и нерастяжимой нитью, конец которой  закреплен неподвижно. Цилиндр падает без начальной скорости, разматывая нить.
закреплен неподвижно. Цилиндр падает без начальной скорости, разматывая нить.
Определить скорость оси цилиндра после того, как ось опустится на высоту  , и найти натяжение
, и найти натяжение  нити.
нити.
Решение. К цилиндру приложены внешние силы:  — сила тяжести цилиндра;
— сила тяжести цилиндра;  — натяжение нити.
— натяжение нити.
За начало координат примем положение центра масс цилиндра  в начальный момент. Направление осей
в начальный момент. Направление осей  и
и  показано на рис.11.4.
показано на рис.11.4.

Дифференциальные уравнения плоского движения в данном случае имеют вид:

Угол поворота цилиндра отсчитываем по направлению по часовой стрелке.
Поскольку 
то из уравнения (2) имеем:
 и
и 
Следовательно, скорость центра масс будет иметь только одну составляющую —  и поэтому
и поэтому  .
.
Уравнение (1) запишем в виде:

В этом уравнении две неизвестных величины —  и . Для получения дополнительного условия воспользуемся уравнением (3), которое запишем в виде:
и . Для получения дополнительного условия воспользуемся уравнением (3), которое запишем в виде:

или

где  — момент инерции цилиндра относительно оси, которая проходит через его центр масс.
— момент инерции цилиндра относительно оси, которая проходит через его центр масс.
Между угловой скоростью  и скоростью центра масс существует зависимость. Поскольку точка
и скоростью центра масс существует зависимость. Поскольку точка  — мгновенный центр скоростей цилиндра, то
— мгновенный центр скоростей цилиндра, то

Подставим значение в уравнение (5):

Левые части уравнений (4) и (6) равны, следовательно, равны и правые части:
Откуда: 
Откуда получим:

Подставим в уравнение (4) значение :

Поскольку необходимо определить скорость центра масс как функцию расстояния, а не времени, в последнем уравнении заменим переменную  на переменную :
на переменную :

Разделим переменные и проинтегрируем:

и

Окончательно,

Ответ: 
Задача № 4
Однородный стержень  длиной
длиной  и весом (рис.11.5) одним концом закреплен с помощью плоского шарнира в точке ; второй конец стержня удерживается нитью
и весом (рис.11.5) одним концом закреплен с помощью плоского шарнира в точке ; второй конец стержня удерживается нитью  , которая составляет со стержнем угол
, которая составляет со стержнем угол  . Стержень составляет с горизонтом угол .
. Стержень составляет с горизонтом угол .

Определить, как изменится давление стержня на шарнир , если нить оборвется.
Решение. Сначала определим реакции в шарнире и натяжение нити . На стержень действует плоская система сил: сила тяжести  , натяжение
, натяжение  нити , направленное от точки к точке , а также реакция шарнира в виде составляющих
нити , направленное от точки к точке , а также реакция шарнира в виде составляющих  и
и  , которые направим в сторону положительных направлений осей
, которые направим в сторону положительных направлений осей  и
и  .
.
Составим уравнение равновесия плоской системы сил, приложенной к стержню :

Из уравнения (3) находим натяжение нити  :
:

Подставляя значения в уравнения (1) и (2) находим реакции  и
и  :
:

Если нить оборвется, то стержень начнет совершать вращательное движение вокруг шарнира .
Дифференциальные уравнения такого движения, учитывая, что точка неподвижна, можно записать в виде:

где и — координаты центра масс стержня;
— угол, определяющий положение стержня в момент разрыва нити ;
 — момент силы тяжести стержня относительно оси шарнира ;
— момент силы тяжести стержня относительно оси шарнира ;
 — момент инерции стержня относительно оси шарнира .
— момент инерции стержня относительно оси шарнира .
С рис.11.5 вытекает:

Продифференцируем эти выражения дважды, учитывая, что угол зависит от времени :

Поскольку в момент разрыва нити  , то
, то

Подставив найденные значения  и
и  в выражения (4) и (5), получим:
в выражения (4) и (5), получим:

Для определения неизвестного значения  воспользуемся уравнением (6), которое для момента обрыва нити запишется следующим образом:
воспользуемся уравнением (6), которое для момента обрыва нити запишется следующим образом:

откуда

Момент инерции однородного стержня относительно оси, которая проходит через его конец:

Тогда

Подставив значение в уравнения (7) и (8), получим:

Следовательно, изменение реакций после обрыва нити будет равно:


Ответ: 
Задача № 5
Тяжелое тело состоит из стержня длиной  и весом
и весом  и прикрепленного к нему диска с радиусом
и прикрепленного к нему диска с радиусом  и весом
и весом  В начальный момент при вертикальном положении стержня (рис.11.6,а) телу придается такое движение, что скорость центра тяжести
В начальный момент при вертикальном положении стержня (рис.11.6,а) телу придается такое движение, что скорость центра тяжести  стержня равна нулю, а скорость центра тяжести
стержня равна нулю, а скорость центра тяжести  диска равна
диска равна  и направлена по горизонтали вправо.
и направлена по горизонтали вправо.

Определить следующее движение тела, принимая во внимание только действие сил тяжести.
Решение. Сначала определим положение центра масс тела. Для этого с точкой свяжем систему координат  (рис.11.6, а).
(рис.11.6, а).
Как видно из рисунка, вследствие симметрии тела относительно оси  центр масс должен лежать на этой оси, то есть
центр масс должен лежать на этой оси, то есть  . Для определения второй координаты () воспользуемся известным выражением:
. Для определения второй координаты () воспользуемся известным выражением:

Для рассматриваемого случая эта формула принимает вид:

где  — масса стержня, равная
— масса стержня, равная  ;
;
 — масса диска, равная
— масса диска, равная  ;
;
 — координата центра масс (тяжести) стержня:
— координата центра масс (тяжести) стержня:

 — координата центра масс (тяжести) диска.
— координата центра масс (тяжести) диска.

С учетом приведенных соотношений формула (1) примет вид:

или

Таким образом, центр масс тела находится в точке с координатами  . Итак, центр масс тела совпадает с точкой , с которой мы связали начало системы координат .
. Итак, центр масс тела совпадает с точкой , с которой мы связали начало системы координат .
Для определения движения тела, изобразим его в промежуточном положении на траектории (рис.11.6, б) и покажем действующие на тело силы:  — сила тяжести стержня и
— сила тяжести стержня и  — сила тяжести диска.
— сила тяжести диска.
Принимаем за полюс центр масс , а за положительное направление угла поворота — вращение тела против хода часовой стрелки.
Дифференциальные уравнения плоского движения (11.4) в данном случае примут вид

Из уравнения (2) вытекает:

Итак, проекция скорости центра масс на ось  сохраняется постоянной во время движения тела.
сохраняется постоянной во время движения тела.
Определим величину  . По условиям задачи в начальный момент времени (
. По условиям задачи в начальный момент времени ( ) скорость центра тяжести
) скорость центра тяжести  диска равна
диска равна  и направлена по горизонтали вправо, а скорость центра тяжести
и направлена по горизонтали вправо, а скорость центра тяжести  стержня равна нулю. Следовательно, точка
стержня равна нулю. Следовательно, точка  является мгновенным центром скоростей. Тогда (рис. 11.6, а)
является мгновенным центром скоростей. Тогда (рис. 11.6, а)
 откуда
откуда 
или

Таким образом,

Определим закон движения центра масс по направлению оси :

Поскольку при  то
то 
Таким образом,

Центр масс в направлении оси движется равномерно.
Из дифференциального уравнения (3) определим закон движения центра масс тела по направлению оси .
Запишем уравнение (3) в виде:

Поскольку  то последнее уравнение примет вид:
то последнее уравнение примет вид:

Разделяя переменные и интегрируя, находим зависимость скорости центра масс тела по направлению оси от времени:

Постоянную интегрирования  определяем по начальным условиям: при
определяем по начальным условиям: при  Следовательно,
Следовательно, 
Таким образом,

то есть по направлению оси в центр масс движется равноускорено.
Находим закон движения центра масс:

Разделим переменные и проинтегрируем:

Постоянную интегрирования  определяем по начальным условиям: при
определяем по начальным условиям: при  откуда
откуда 
Следовательно, закон движения центра имеет тела по направлению оси имеет вид:

Решая вместе зависимости (5) и (6), находим уравнение траектории центра масс.
Из выражения (5) вытекает, что

Подставив значение в зависимость (6), получим:

Таким образом, центр масс тела (точка ) движется по параболе.
Определим закон вращательного движения тела вокруг оси, которая проходит через центр масс тела. Для этого уравнения (4) запишем в виде (рис.11.6, б):

где  — плечо силы
— плечо силы  относительно точки ;
относительно точки ;
 — плечо силы
— плечо силы  относительно точки .
относительно точки .
С рис. 11.6,б найдем:

Подставляя в выражение (7) значения  и
и  , получим:
, получим:

откуда, при  , вытекает:
, вытекает:
 или
или 
Таким образом, при движении в плоскости  тело вращается вокруг оси, которая проходит через центр масс, с постоянной угловой скоростью, равной угловой скорости
тело вращается вокруг оси, которая проходит через центр масс, с постоянной угловой скоростью, равной угловой скорости  в начальный момент времени.
в начальный момент времени.
По условиям задачи, при  скорость точки
скорость точки  равнялась
равнялась  . Поскольку точка
. Поскольку точка  — мгновенный центр скоростей, то
— мгновенный центр скоростей, то

откуда

Ответ: 
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки