Для занятия необходима установленная на компьютерах среда программирования miniBloq и драйвера для Arduino.
|
Макетные провода папа-папа |
10 |
Контроллер Arduino UNO |
1 |
|
|
Светодиод |
3 |
Беспаечная макетная плата |
1 |
|
|
УЗ датчик расстояния |
1 |
Резистор 220 Ом |
3 |
|
|
ИК датчик препятствия |
1 |
Макетные провода папа-мама |
4 |
Для дополнительного задания
|
Вибромотор |
1 |
Транзистор 2N3904 |
1 |
Сегодня мы попробуем разобраться, как можно видеть объекты и определять расстояние до них.
Датчик препятствий
Каждый робот, способный ездить, летать или плавать, должен видеть препятствия, находящиеся у него на пути.
Чтобы робот смог это сделать, ему необходимы соответствующие датчики. В английской литературе такие устройства называют proximity sensor, мы же их будем называть датчиками препятствия.
Мы рассмотрим один из самых распространенных датчиков препятствия, который работает по принципу отражения.
Устроен он очень просто. Датчик содержит направленный источник света и детектор света. Источником часто служит инфракрасный светодиод с линзой, а детектором — фотодиод или фототранзистор. (Рис.1)

Рис.1 Датчик препятствия
Светодиод на датчике постоянно включен и излучает узкий пучок света в прямом направлении. Если перед датчиком есть препятствие (Рис.1 А), то на детектор попадает отраженный свет от источника, и на выходе датчика появляется положительный импульс.
В противном случае, если препятствия нет, то датчик молчит (Рис.1 Б).
Есть и третий вариант, когда препятствие есть, а датчик его не видит. Как вы думаете, как получить такой результат?
Для того, чтобы произошла данная ситуация, необходимо, чтобы свет не отражался от препятствия. (Рис.1 B) Получается, матовую черную поверхность датчик не увидит, так как черный цвет плохо отражает свет.
Если же мы будем оценивать и яркость отраженного сигнала, то мы сможем получить грубое понимание расстояния до объекта, ведь чем ближе объект, тем ярче отражение.
В нашей работе мы используем датчик препятствия, оснащенный компаратором, что немного ограничивает его сферу применения. Компаратор преобразовывает аналоговый сигнал (от 0В до 5В) в цифровой (Да или Нет)
Давайте, соберем схему которая будет распознавать препятствия и сигнализировать о них. (Рис.2)
Т.к. наш датчик имеет цифровой сигнальный выход, то подключим его к цифровому входу Ардуино.

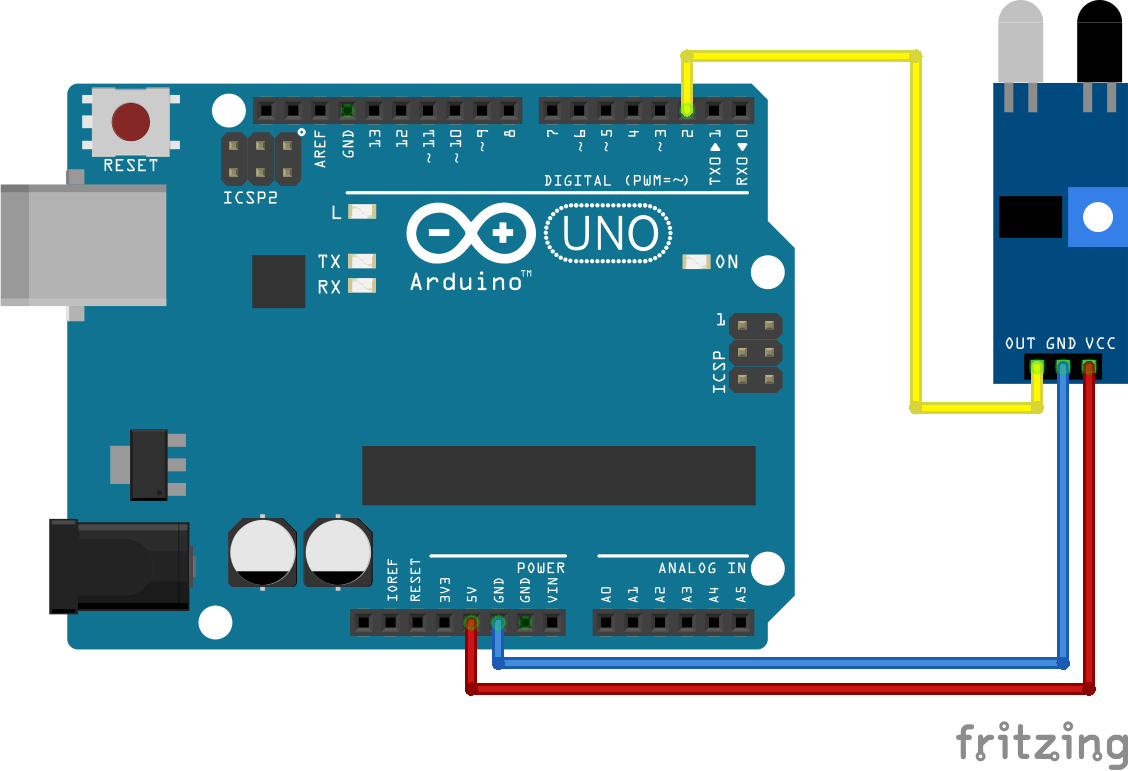
Рис. 2. Сигнализатор препятствий
Обратите внимание
Как известно, вокруг нас имеется множество источников инфракрасного излучения, включая лампы освещения и солнце. Фоточувствительный элемент датчика регистрирует это фоновое излучение, и может дать ложный сигнал срабатывания. Другими словами, датчик препятствия может сработать, когда никакого препятствия и нет вовсе.
Чтобы решить эту проблему, на датчике имеется возможность настроить чувствительность таким образом, чтобы воспринимать только свет достаточной силы.
Для настройки порогового напряжения нам понадобится шлицевая отвертка (она же — плоская). В этой процедуре нам также поможет зеленый светодиод состояния, который загорается, когда датчик регистрирует достаточный уровень инфракрасного света.
Алгоритм настройки сводится к трем шагам:
-
помещаем датчик в условия освещенности, в которых он будет работать;
-
подключаем датчик к питанию, при этом на нем загорится красный светодиод;
-
убираем перед датчиком все препятствия и крутим потенциометр до тех пор, пока зеленый светодиод состояния не погаснет.
Для проверки поднесем к датчику ладонь, и на определенном расстоянии загорится зеленый светодиод. Уберем руку — светодиод погаснет.
Важно. Расстояние, на котором датчик регистрирует препятствие зависит от уровня фоновой засветки, от настройки чувствительности и от правильного расположения фотодиода и светодиода на датчике. Они должны быть расположены строго параллельно друг другу.
Теперь, когда датчик настроен должным образом, приступим к составлению программы. (Рис.3)
Для примера, будем зажигать и гасить светодиод на пине D13 на Ардуино Уно в зависимости от показаний датчика.
При использовании цифрового датчика программа будет такой же, как и в случае работы с кнопками.
На каждой итерации вечного цикла мы считываем значение на пине D2, и затем сравниваем это значение с уровнем HIGH. Если значение равно HIGH, значит датчик видит препятствие, и мы зажигаем светодиод, в противном случае — гасим.

Рис.3. Сигнализатор препятствий
Как думаете где нам может пригодится такое устройство?
Этот датчик широко используется в колесных роботах, например для объезда препятствий и детектирования края стола, по которому он ездит.
Выберите одно из 2х применений и напишите в тетради блок-схему этого робота.
Датчик расстояния
Теперь мы разберем работу одного из самых популярных датчиков — ультразвукового (УЗ) дальномера.
Существует много разных модификаций подобных устройств, но все они работают по принципу измерения времени прохождения отраженного звука. То есть датчик отправляет звуковой сигнал в заданном направлении, затем ловит отраженное эхо и вычисляет время полета звука от датчика до препятствия и обратно. (Рис.4)
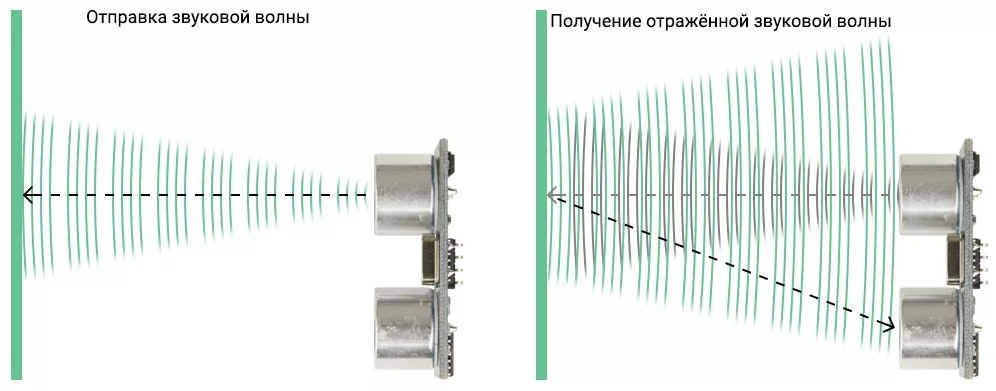
Рис.4. Сигнализатор препятствий
Из курса физики мы знаем, что скорость звука в некоторой среде величина постоянная, но зависит от плотности среды. Зная скорость звука в воздухе и время полета звука до цели, мы можем рассчитать пройденное звуком расстояние по формуле:
s = v*t
где v — скорость звука в м/с, а t — время в секундах. Скорость звука в воздухе, кстати, равна 340,29 м/с.
Чтобы справиться со своей задачей, дальномер имеет две важные конструктивные особенности.
Во-первых, чтобы звук хорошо отражался от препятствий, датчик испускает ультразвук с частотой 40 кГц. Для этого в датчике имеется пьезокерамический излучатель, который способен генерировать звук такой высокой частоты.
Во-вторых, излучатель устроен таким образом, что звук распространяется не во все стороны (как это бывает у обычных динамиков), а в узком направлении. На Рис.5 представлена диаграмма направленности типичного УЗ дальномера.
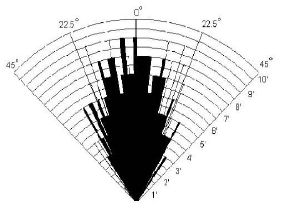
Рис.5 Диаграмма направленности типичного УЗ дальномера
Как видно на диаграмме, угол обзора самого простого УЗ дальномера составляет примерно 50-60 градусов. Для типичного варианта использования, когда датчик детектирует препятствия перед собой, такой угол обзора вполне пригоден. Ультразвук сможет обнаружить даже ножку стула, тогда как лазерный дальномер, к примеру, может её не заметить.
Если же мы решим сканировать окружающее пространство, вращая дальномер по кругу как радар, УЗ дальномер даст нам очень неточную и шумную картину. Для таких целей лучше использовать как раз лазерный дальномер.
Так же как и ИК дальномер, УЗ дальномер имеет свои недостатки. И тоже может не определять расстояние до некоторых предметов. Как вы думаете до каких и почему?
Поверхности имеющие пористую структуру хорошо поглощают ультразвук, и датчик не может измерить расстояние до них. Например, если мы задумаем измерить расстояние от мультикоптера до поверхности поля с высокой травой, то скорее всего получим очень нечеткие данные. Такие же проблемы нас ждут при измерении дистанции до стены, покрытой поролоном или мягким ковром.
Есть и второй недостаток. Он связан со скоростью звуковой волны. Эта скорость недостаточно высока, чтобы сделать процесс измерения относительно частым. Допустим, перед роботом есть препятствие на удалении 4 метра. Чтобы звук слетал туда и обратно, потребуется целых 24 мс.
В этом уроке мы будем работать с датчиком HC-SR04 и контроллером Ардуино Уно. Этот популярный дальномер умеет измерять расстояние от 1–2 см до 4–6 метров. При этом, точность измерения составляет 0,5–1 см.
Встречаются разные версии одного и того же HC-SR04. Одни работают лучше, другие хуже. Отличить их можно по рисунку платы на обратной стороне. Версия, которая работает хорошо выглядит так:


А вот версия, которая может давать сбои:


Датчик HC-SR04 имеет четыре вывода. Кроме земли (Gnd) и питания (Vcc) еще есть Trig и Echo. Для того чтобы дальномер работал корректно с нашей средой разработки, подключим:
Trig к D15
Echo к D16
А в программе будем выбирать 15-й пин.
Давайте считаем показания дальномера и выведем их в терминал. (Рис. 6)

Рис.6 Обработка показаний дальномера
Если у вас все заработало, предлагаю вам поэкспериментировать с разными препятствиями.
Измените программу, чтобы при нахождении препятствия ближе 15 см, загорался светодиод на пине D13. (Рис.7)

Рис.7
Теперь предлагаю вам собрать устройство со светодиодным индикатором.
Задача звучит так:
Если расстояние до объекта больше метра, то не горит ни одного светодиода.
Если расстояние от 70 см до 100 см, то горит 1 светодиод.
Если расстояние от 40 см до 70, то горит 2 светодиода.
Если расстояние меньше 40 см, то горит 3 светодиода.
Дополнительное упражнение
Ультразвуковая трость.
Напишите программу, которая будет «вибрировать» вибромотором с различной частотой, в зависимости от измеренного расстояния.
Например, если расстояние до препятствия более трех метров — вибромотор вибрирует раз в пол секунды.
При расстоянии 1 метр — раз в 100 мс.
Менее 10 см — вибрирует постоянно.
Мы с вами большие молодцы, продолжайте в том же духе!
Определение расстояний и дальностей по звуку и вспышке выстрела иливзрыва производят следующим образом. Определяют время от момента вспышки до момента восприятия звука и вычисляют дальность по формуле Д = 330t, где Д — расстояние до места вспышки, метров, а t — время от момента вспышки до момента восприятия звука, секунд. При этом средняя скорость распространения звука принимается равной 330 м/с.
Пример определения расстояний и дальностей по звуку и вспышке выстрела или взрыва.
Звук был услышан через 10 секунд после вспышки. Расстояние до места взрыва равно 3300 метров.
Измерение расстояний и дальностей по линейному размеру и угловой величине наблюдаемого предмета.
Если известна линейная величина (высота, щирина или длина) предмета, то по углу, под которым виден этот предмет, можно определить расстояние до него поформуле тысячных:
Д=1000В/У
где Д — расстояние до предмета в метрах.
В — линейный размер предмета в метрах.
У — угловая величина предмета в тысячных.
Угловая величина предмета измеряется биноклем,линейкой с миллиметровыми делениями или каким-либо подручным предметом, угловые размеры которого известны. Линейные размеры некоторых предметов приведены в таблице ниже.

Пример измерения расстояний и дальностей по линейному размеру и угловой величине наблюдаемого предмета.
Угловая величина длины танка (7 метров), определенная по шкале бинокля, составляет 0-10. Расстояние до танка :
Д = 1000 х 7 / 10 = 700 метров
Измерение расстояний и дальностей по спидометру.
По спидометру расстояние (протяженность маршрута) определяют как разность отсчетов на конечном и исходном пунктах. Точность определения расстояний по спидометру зависит от условий сцепления колес (гусениц) с грунтом, износа протекторов,давления в шинах. При движении по шоссе и твердому грунту погрешность не превышает 3—5% пройденного пути.
При отклонении показаний спидометра от фактического расстояния, пройденного машиной, свыше 5%, рекомендуется вводить в результаты измерений соответствующую поправку, которая определяется прогоном машины по дороге, типичной для данного маршрута. Длину участка дороги, выбранного для контроля спидометра, определяют по километровым столбам или покарте. В последнем случае дорога должна быть прямолинейной и не короче 10 км.
Измерение расстояний и дальностей промером шагами.
При измерении расстояний шаги считают парами. Пару шагов можно принимать в среднем за 1,5 метра. Для более точныхподсчетов длину пары шагов определяют из промера шагами линии не менее 200 метров, длина которой известна из более точных измерений. При равном, хорошо выверенном шаге погрешность измерения не превышает 5% пройденного расстояния.
Определение ширины реки, оврага и других препятствий, построением равнобедренного прямоугольного треугольника.
У реки (препятствия) выбирают точку А так, чтобы на ее противоположной стороне был виден какой-либо ориентир В и, кроме того, вдоль реки возможно было бы измерить линию. В точке А восстанавливают перпендикуляр АС к линии АВ и в этом направлении измеряют расстояние (шнуром, шагами и т. п.) до точки С, в которой угол АСВ будет равен 45 градусов.

В этом случае расстояние АС будет соответствовать ширине препятствия АВ. Точку С находят путем приближения, измеряя несколько раз угол АСВ каким-либо доступнымспособом. Например компасом, с помощью часов или глазомерно.
По материалам книги «Справочник по военной топографии».
А. М. Говорухин, А. М. Куприн, А. Н. Коваленко, М. В. Гамезо.
Звук распространяется в воздухе со скоростью 330 м/с, т. е. округленно 1 км за 3 с, а свет — практически мгновенно (300000 км/ч).
Таким образом, например, расстояние в километрах до места вспышки выстрела (взрыва) равно числу секунд, прошедших от момента вспышки до момента, когда был услышан звук выстрела (взрыва), деленному на 3.
Например, наблюдатель услышал звук взрыва через 11 с после вспышки. Расстояние до места вспышки будет равно:
Читать полный конспект Линейные и угловые единицы измерений

Возможно, вам известен метод, позволяющий узнать, как далеко находится гроза, путем подсчета секунд после удара молнии? В этой короткой статье мы поговорим об этом.
Для тех, кто не знает этот трюк, после прочтения вы узнаете, как быстро оценить расстояние до грозы, а также почему подсчет секунд позволяет оценить расстояние.
Молния и гром
Прежде всего, хотя мы говорим о «расстоянии до грозы», описанный ниже метод используется для оценки расстояния до конкретного удара молнии, необязательно до грозы в целом.
Во время грозы воздушные потоки производят разность электрических зарядов, которые в итоге скапливаются между землей и облаком (и даже частями одного и того же облака).
Эта разность потенциалов может достигать, по некоторым оценкам, миллиарда вольт, и когда потенциал слишком высок, воздух становится ионизированным, и ток на короткое время устанавливается между землей и облаком, образуя проводящий переход, и происходит вспышка молнии.
Молния кратковременна. Проходящий ток нагревает воздух до температуры более 10 000 Кельвинов (в два раза выше температуры поверхности Солнца). Воздух сильно загорается и становится видимым: это молния.
Все еще находясь под действием температуры, нагретый таким образом воздух мгновенно расширяется и вызывает ударную волну, или, другими словами, очень громкий звук — гром.
Таким образом, молния, которая является световой, и гром, который является звуковым, производятся одновременно.
Для нас интересно то, что свет распространяется со скоростью 300 000 000 метров в секунду (1 миллиард км/ч), в то время как звук распространяется со скоростью «всего» 340 метров в секунду (1200 км/ч). Это означает, что свет распространяется в миллион раз быстрее, чем звук.
С точки зрения человеческого восприятия, молния видна сразу, на каком бы расстоянии она ни находилась, а грому требуется несколько секунд, чтобы стать слышимым, в зависимости от расстояния.
Эта разница используется для определения расстояния до места удара молнии.
Оценка расстояния до грозы
За каждую секунду звук проходит 340 метров. Считая количество секунд между молнией и громом, мы подсчитываем, сколько раз в 340 метрах она находится.
Чтобы получить расстояние в метрах, просто посчитайте количество секунд и умножьте его на 340:
расстояние в метрах = секунды × 340
Для простоты можно также считать, что 1 км ~ 3 × 340 метров. Таким образом, каждый раз, когда вы отсчитываете 3 секунды, вы должны отсчитывать 1 км.
И наоборот, если вы разделите количество секунд на 3, вы сразу получите приблизительное расстояние в километрах.
Если считать от 1 до 3 секунд, это означает, что буря находится на расстоянии менее километра…
Заключение
Преобразование длительности в расстояние с учетом заданной скорости (здесь — скорости звука) — это то, что мы делаем регулярно.
Когда мы говорим, что живем в 1 часе езды от Москвы на машине, это означает, что мы находимся в X километрах от Москвы и едем со скоростью автомобиля (возможно, с учетом возможных пробок при подъезде к городу).
То же самое относится и к понятию светового года: «один световой год» соответствует расстоянию: расстоянию, проходимому светом, и, следовательно, примерно одному миллиарду километров в час. Один световой год соответствует примерно 9 400 миллиардам километров.
Таким образом, если свету требуется 1 год, чтобы достичь нас, это означает, что звезда находится на расстоянии 9 400 миллиардов километров.