Координаты вектора в декартовой системе координат (ДСК)
Для начала дадим определение координат вектора в заданной системе координат. Чтобы ввести данное понятие, определим что мы называем прямоугольной или декартовой системой координат.
Прямоугольная система координат представляет из себя прямолинейную систему координат с взаимно перпендикулярными осями на плоскости или в пространстве.
С помощью введения прямоугольной системы координат на плоскости или в трехмерном пространстве становится возможным описывание геометрических фигур вместе с их свойствами при помощи уравнений и неравенств, то есть использовать алгебраические методы при решении геометрических задач.
Тем самым, мы можем привязать к заданной системе координат векторы. Это значительно расширит наши возможности при решении определенных задач
Прямоугольная система координат на плоскости обычно обозначается O x y , где O x и O y – оси коорднат. Ось O x называют осью абсцисс, а ось O y – осью ординат (в пространстве появляется ещё одна ось O z , которая перпендикулярна и O x и O y ).
Итак, нам дана прямоугольная декартова система координат O x y на плоскости если мы отложим от начала координат векторы i → и j → , направление которых соответственно совпадет с положительными направлениями осей O x и O y , и их длина будет равна условной единице, мы получим координатные векторы. То есть в данном случае i → и j → являются координатными векторами.
Координатные векторы
Векторы i → и j → называются координатными векторами для заданной системы координат.
Откладываем от начала координат произвольный вектор a → . Опираясь на геометрическое определение операций над векторами, вектор a → может быть представлен в виде a → = a x · i → + a y · j → , где коэффициенты a x и a y — единственные в своем роде, их единственность достаточно просто доказать методом от противного.
Разложение вектора
Разложением вектора a → по координатным векторам i → и j → на плоскости называется представление вида a → = a x · i → + a y · j → .
Коэффициенты a x и a y называются координатами вектора в данной системе координат на плоскости.
Координаты вектора в данной системе координат принято записывать в круглых скобках, через запятую, при этом заданные координаты следует отделять от обозначения вектора знаком равенства. К примеру, запись a → = ( 2 ; — 3 ) означает, что вектор a → имеет координаты ( 2 ; — 3 ) в данной системе координат и может быть представлен в виде разложения по координатным векторам i → и j → как a → = 2 · i → — 3 · j → .
Следует обратить внимание, что порядок записи координат, имеет важное значение, если вы запишите координаты вектора в другом порядке, вы получите совершенно другой вектор.
Опираясь на определения координат вектора и их разложения становится очевидным, что единичные векторы i → и j → имеют координаты ( 1 ; 0 ) и ( 0 ; 1 ) соответственно, и они могут быть представлены в виде следующих разложений i → = 1 · i → + 0 · j → ; j → = 0 · i → + 1 · j → .
Также имеет место быть нулевой вектор 0 → с координатами ( 0 ; 0 ) и разложением 0 → = 0 · i → + 0 · j → .
Равные и противоположные векторы
Векторы a → и b → равны тогда, когда их соответствующие координаты равны.
Противоположным вектором называется вектор противоположный данному.
Отсюда следует, что координаты такого вектора будут противоположны координатам данного вектора, то есть, — a → = ( — a x ; — a y ) .
Все вышеизложенное можно аналогично определить и для прямоугольной системы координат, заданной в трехмерном пространстве. В такой системе координат имеет место быть тройка координатных векторов i → , j → , k → , а произвольный вектор a → раскладывается не по двум, а уже по трем координатам, причем единственным образом и имеет вид a → = a x · i → + a y · j → + a z · k → , а коэффициенты этого разложения ( a x ; a y ; a z ) называются координатами вектора в данной (трехмерной) системе координат.
Следовательно, координатные векторы в трехмерном пространстве принимают также значение 1 и имеют координаты i → = ( 1 ; 0 ; 0 ) , j → = ( 0 ; 1 ; 0 ) , k → = ( 0 ; 0 ; 1 ) , координаты нулевого вектора также равны нулю 0 → = ( 0 ; 0 ; 0 ) , и в таком случае два вектора будут считаться равными, если все три соответствующие координаты векторов между собой равны a → = b → ⇔ a x = b x , a y = b y , a z = b z , и координаты противоположного вектора a → противоположны соответствующим координатам вектора a → , то есть, — a → = ( — a x ; — a y ; — a z ) .
Координаты радиус-вектора точки
Чтобы ввести данное определение, требуется показать в данной системе координат связь координат точки и координат вектора.
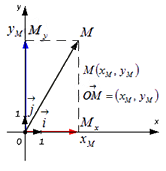
Пусть нам дана некоторая прямоугольная декартова система координат O x y и на ней задана произвольная точка M с координатами M ( x M ; y M ) .
Вектор O M → называется радиус-вектором точки M .
Определим, какие координаты в данной системе координат имеет радиус-вектор точки
Вектор O M → имеет вид суммы O M → = O M x → + O M y → = x M · i → + y M · j → , где точки M x и M y это проекции точки М на координатные прямые Ox и Oy соответственно (данные рассуждения следуют из определения проекция точки на прямую), а i → и j → — координатные векторы, следовательно, вектор O M → имеет координаты ( x M ; y M ) в данной системе координат.
Иначе говоря, координаты радиус-вектора точки М равны соответствующим координатам точки М в прямоугольной декартовой системе координат.
Аналогично в трехмерном пространстве радиус-вектор точки M ( x M ; y M ; z M ) разлагается по координатным векторам как O M → = O M x → + O M y → + O M z → = x M · i → + y M · j → + z M · k → , следовательно, O M → = ( x M ; y M ; z M ) .
Что такое радиус-вектор
Радиус-вектор – это вектор, начало которого совпадает с точкой (0 ; 0) — началом координат.
Почему радиус-вектор так называют
Если начертить окружность с центром в точке (0 ; 0), этот вектор станет её радиусом.
Любой вектор можно превратить в радиус-вектор. Для этого сдвигаем его так, чтобы начало этого вектора совместить с точкой (0 ; 0).

При этом, помним: перемещать вектор можно, а поворачивать его нельзя!
Чем радиус-вектор удобен для использования
Чтобы найти координаты вектора, нужно найти разности соответственных координат точек, расположенных в конце и начале вектора.
Для радиус-вектора вычислять координаты не нужно. Можно воспользоваться правилом:
Координаты радиус-вектора — это координаты его конечной точки.

Сравните координаты конечной точки и координаты вектора на рисунке 2.
Как найти радиус вектора
Что такое радиус-вектор
Радиус-вектор – это вектор, начало которого совпадает с точкой (0 ; 0) — началом координат.
Почему радиус-вектор так называют
Если начертить окружность с центром в точке (0 ; 0), этот вектор станет её радиусом.
Любой вектор можно превратить в радиус-вектор. Для этого сдвигаем его так, чтобы начало этого вектора совместить с точкой (0 ; 0).
При этом, помним: перемещать вектор можно, а поворачивать его нельзя!
Чем радиус-вектор удобен для использования
Чтобы найти координаты вектора, нужно найти разности соответственных координат точек, расположенных в конце и начале вектора.
Для радиус-вектора вычислять координаты не нужно. Можно воспользоваться правилом:
Координаты радиус-вектора — это координаты его конечной точки.
Сравните координаты конечной точки и координаты вектора на рисунке 2.
Как найти радиус вектора

Получите бесплатный курс по основам математики. Эти знания необходимы для решения задач по физике.
Векторная алгебра с нуля!
Получите бесплатный курс по Векторной алгебре. Он необходим для решения задач по физике.
Книги по изучению физики и для подготовки к ЕГЭ
Радиус-вектор
Радиус-вектор точки — это вектор, начало которого совпадает с началом системы координат, а конец — с данной точкой.
Таким образом, особенностью радиус-вектора, отличающего его от всех других векторов, является то, что его начало всегда находится в точке начала координат (рис. 17).

Введение понятия радиус-вектора оказалось чрезвычайно плодотворным при изучении различных физических явлений. В частности, это понятие широко используется в механике.
Как известно, положение точки можно задать с помощью ее координат. Так, если известны координаты x1 и y1 точки В или координаты x2 и y2 точки С, то мы легко находим положения этих точек на плоскости. Этот способ определения положения точки с помощью ее координат называется координатным способом.
Но можно определить положение точки и по-другому, а именно с помощью радиус-вектора. Если известен радиус-вектор данной точки, то и ее положение оказывается известным, поскольку точка конца радиус-вектора совпадает с данной точкой. Так, положение точки В — это конец ее радиус-вектора r1, а положение точки С — это конец ее радиус-вектора r2. Этот способ определения положения точки с помощью ее радиус-вектора называется векторным способом.
Эти способы эквивалентны друг другу. Покажем это. Найдем проекции радиус-вектора r1 точки В на координатные оси. Напомню, чтобы найти проекцию вектора на ось нужно из координаты конца вектора вычесть координату его начала. Тогда
Аналогично для проекций радиус-вектора r2 точки С:
r2y = y2 − 0 = y2. Таким образом, проекции радиус-векторов точек являются координатами этих точек (рис. 18).

На практике применяются как координатный, так и векторный способы. Более того, при решении многих задач их применяют совместно, что является мощным методом решения, поскольку он позволяет использовать единый подход для решения совершенно разных задач.
Книги по изучению физики и для подготовки к ЕГЭ
Эти книги должен иметь каждый старшеклассник, абитуриент и студент!
Пожалуйста, не забудьте поделиться о прочитанном со своими друзьями в соц. сетях (см. кнопки ниже).
© Коллекция подготовительных материалов для успешной сдачи ЕГЭ по физике от Н. Чернова 2012 — 2015 | Контакты: , +79212839427, (81554) 65780
Физика
А Вы уже инвестируете?
Слышали про акцию в подарок?
Зарегистрируйся по этой ссылке
и получи акцию до 100.000 руб
План урока:
Механическое движение. Система отсчёта. Закон относительности движения
Механическим движением в физике называется изменение с течением времени положения тела (или его частей) в пространстве относительно других тел.
То есть, чтобы сказать, что тело или система совершает механическое движение, нам необходимо: 1) наблюдать его во времени; 2) сравнивать его положение с положением какого-то другого тела (относительно этого тела).
Например, пассажир в едущем автомобиле неподвижен относительно кресла, на котором он сидит, но он движется относительно людей, стоящих на автобусной остановке и самой остановки. А сама автобусная остановка неподвижна относительно стоящих людей, ждущих автобус (см. рисунок 1). Однако она движется относительно проезжающих мимо машин. В первом случае наблюдаемым объектом был человек в машине, а точкой отсчета кресло и люди на остановке. Во втором случае наблюдаемой была автобусная остановка, а точками отсчета – люди на остановке и проезжающие мимо машины.
Рисунок 1 – Иллюстрация к примеру
Из примеров можно сделать вывод, что важно, какой именно объект находится под наблюдением и относительно какого объекта – тела отсчета – рассматривается его движение. Отсюда можно сформулировать закон относительности движения: характер движения тела зависит от того, относительно какого объекта мы рассматриваем данное движение.
Тело (или точка) отсчета, связанная с ним система координат и часы, вместе образуют систему отсчета. То есть все сказанное выше можно переформулировать в одно предложение: для наблюдения механического движения важно в какой системе отсчета будет происходить наблюдение.
Рисунок 2 – Пример системы отсчета (наблюдаемы объект – летящий мяч, тело отсчета – камень, лежащий в начале координат, система координат и секундомер для отсчета времени)
Однако объекты могут быть очень сложными для наблюдения. Например, автомобиль едет по прямой несколько километров и необходимо описать его движение относительно камня на обочине. Казалось бы, все просто. Но как именно описать движение автомобиля, если корпус его движется по прямой, а колеса совершают вращательные движения.
Для удобства решения подобных задач принято упрощение: если размер и форма тела в данной задаче не играют важной роли для наблюдателя, можно считать это тело за материальную точку.
Материальная точка – это такое тело, размером и формой которого в условиях данной задачи можно пренебречь.
Приведем пример: когда автобус едет из города А в город Б, его можно рассматривать как материальную точку. Когда пассажир идет из одного конца этого автобуса в другой, считать автобус материальной точкой нельзя. В общем случае можно сказать, что тело можно считать материальной точкой, если его размеры значительно меньше расстояния, на которое оно перемещается.
Уравнения движения. Радиус-вектор. Проекция вектора
Для описания движения тела необходимо уметь рассчитывать его положение в каждый момент времени. Как это сделать?
Самый очевидный способ – координатный. Если вернуться к примеру на рисунке 2, можно увидеть, что летящий мяч в каждый момент времени имеет три координаты по осям OX, OY и OZ. Эти координаты являются функциями времени (т.е. они зависят от времени), а значит, их можно записать в виде системы:
Вид этих уравнений будет зависеть от многих вещей: от того, с какой силой бросили мяч в начале, от массы мяча, под каким углом его бросили и так далее. В любом случае, если эти уравнения заданы, можно найти координаты (то есть положение) тела в любой момент времени. Поиск этих уравнений – основная задача кинематики.
Эта система является кинематическими уравнениями движения тела или материальной точки, записанными в координатной форме. Повторим: если вид уравнений движения задан, можно узнать координату движущейся точки в любой момент времени.
В общем случае, координат три, но иногда можно обойтись двумя или даже одной координатой. Например, для описания движения бильярдного шара достаточно двух координат (так как шар не может двигаться вверх и вниз), а для описания движения шарика, катящегося по прямому горизонтальному желобку достаточно одной координаты (шарик не может двигаться вверх-вниз и вправо-влево).
Еще один способ описания движения – векторный.
*Перед дальнейшим прочтением данной статьи желательно вспомнить основную теорию по теме «Векторы» и «Метод координат»
Вектор, проведенный из начала координат к материальной точке, называется радиус-вектором (см. рисунок 3).
Рисунок 3 – Радиус-вектор (серой линией изображены траектория движения материальной точки, r1 и r2* радиус-векторы, проведенные к этой материальной точке в разные моменты времени)
Радиус-вектор проведенный к материальной точке в разные моменты времени будет разным. Значит, его тоже можно представить, как функцию времени:
r = r(t)
Такая функция и будет уравнением движения в векторной форме. Если ее вид задан, можно описать движение тела с той же полнотой, как и при координатной записи.
Еще раз обозначим отличия: при записи уравнения движения в координатной форме в каждый момент времени наблюдающий будет знать три координаты тела; при записи в векторной форме в каждый момент времени известен радиус-вектор (его модуль и направление). Обе записи равносильны.
*На письме векторы обычно обозначаются стрелкой сверху, над величиной. Однако в печатном тексте не всегда удобно нагромождать формулы дополнительными знаками, поэтому в печати векторные величины пишут просто жирным шрифтом. В данной статье далее жирным шрифтом будут написаны только векторные величины.
Покажем, что векторная и координатная записи равносильны. Для этого необходимо вспомнить, как построить проекцию вектора на ось (см. рисунок 4).
Рисунок 4 – Построение проекции вектора на ось
Чтобы построить проекцию вектора на ось, необходимо опустить перпендикуляра из начала и конца вектора на эту ось. Длина получившегося отрезка между проекциями начала и конца вектора, взятая со знаком «+», если вектор а сонаправлен с осью Х, или со знаком «-», если вектор а противонаправлен оси Х, — это и есть искомая проекция.
Если вектор выходит из начала координат, задача облегчается – необходимо опустить перпендикуляр только из конца вектора.
Напоминания из геометрии:
два вектора равны, если они параллельны или лежат на одной прямой, сонаправлены, а их модули равны;
проекции равных векторов равны.
Рассмотрим пример (см. рисунок 5)
Рисунок 5 – Задача на нахождение проекции векторов
Предлагаем читателю самому подумать, а затем сравнить свои рассуждения с приведенными ниже.
Итак, вектор а: его начала соответствует координате хн=1, а конец хк = 4. Значит ax = хк – хн = 4-1 = 3. Вектор b: его начало лежит в точке хн=2, а конец хк =0. Значит bx = хк – хн = 0-2 = -2.
В двумерном случае, проецировать нужно на две оси, но принцип остается тем же.
Иногда еще нужно находить составляющие компоненты вектора ах и ау. Рассмотрим пример, для простоты возьмем вектор, выходящий из начал координат (см. рисунок 6).
Сумма векторов ах и ау равна а. Модули векторов ах и ау численно равны координатам точек, куда попали перпендикуляры, опущенные из конца вектора а на оси ОХ и ОУ.
Еще следует отметить, что, если известен угол β между вектором а и осью ОХ, воспользовавшись основами тригонометрии, можно найти величины проекций:
Если бы вектор а совпадал с радиус-вектором какой-нибудь точки, то величины ах и ау совпадали бы с координатами тела по осям ОХ и ОY.
Способ с использованием тригонометрических функций удобен, когда координата конца вектора попадает в нецелое число и опустив перпендикуляр на ось его трудно найти точно. В физических задачах такое часто случается.
Рисунок 6 – Нахождение компонент вектора а
Рассмотрим пример (см. рисунок 7). Модуль вектора r равен 2. Сам вектор направлен под углом в 45 градусов к оси ОХ. Необходимо найти величины проекций (они же координаты) этого вектора на оси ОХ и ОУ.
Рисунок 7 – Задача на нахождение проекций вектора в двумерном пространстве
В общем случае радиус-вектор находится в трехмерном пространстве (см. рисунок 8). Построение проекции осуществляется по тому же принципу, что и в рассмотренных выше примерах. Когда строятся проекции на оси ОХ и ОУ, перпендикуляр сначала опускается на плоскость, в которой лежат оси ОХ и ОУ, а затем точка, в которую упал перпендикуляр к плоскости, проецируется на оси ОХ и ОУ.
Точки, в которые попал перпендикуляры к осям – rx, ry, rz – это и есть координаты x, y, z тела в текущий момент времени.
Следует оговориться, что большинство задач 10-го класса будут ограничиваться двумерным пространством.
Рисунок 8 – Построение проекций радиус-вектора
Траектория. Путь. Перемещение
Траектория – это линия, вдоль которой движется тело.
Траектория движения может быть прямолинейной, если тело движется по прямой линии, и криволинейной, если тело движется по кривой.
Путь (S), пройденный телом, равен длине траектории.
Перемещение (r)* – это вектор, проведенный из начала пути в конец.
В случае прямолинейного движения путь и модуль перемещения тела совпадают (см. рисунок 9а). В случае криволинейного – путь и перемещение различаются (см. рисунок 9б), так как длина линии движения тела больше длины вектора, соединяющего начало и конец траектории.
Рисунок 9 – Путь (S) и перемещение (r) при прямолинейном (а) и криволинейном (б) движении
*Иногда перемещение так же, как и путь, называют буквой S — (на письме с вектором над ней, при печати — жирным шрифтом, так как это векторная величина). В данной статье, чтобы не путаться, перемещение называется только буквой r. В целом, обозначения равноправны, поэтому при решении задач можно использовать то, которое удобнее. Однако не стоит забывать отмечать, что именно обозначено под той или иной буквой.
Равномерное прямолинейное движение: скорость и уравнение движения
Путь и перемещение при равномерном прямолинейном движении
Прямолинейное равномерное движение уже рассматривалось в курсе физики ранее, однако приведем основные определения.
Прямолинейное движение – это движение по прямой линии. Равномерное движение – такое, в процессе которого тело за равные временные промежутки проходит один и тот же путь. Если объединить эти два определения получится третье:
- равномерное прямолинейное движение – это такое движение, в ходе которого 1) тело совершает движение по прямой линии; 2) за одинаковые временные промежутки проходит одинаковый путь.
Зная определения пути и перемещения, это определение можно упростить: прямолинейное равномерное движение тела – это такое движение, в процессе которого тело за одинаковые временные промежутки совершает равные перемещения.
Важной характеристикой является скорость механического движения. Предположим, что при равномерном прямолинейном движении тело за промежуток времени △t перемещается из точки А в точку Б (см. рисунок 8). Радиус-вектор, проведенный в точку A обозначим r0, а радиус-вектор в точку Б обозначим r1. Изменение радиус-вектора назовем △r – нетрудно заметить, что это есть перемещение тела за время △t.
Рисунок 8 – Поиск перемещения тела через радиус-векторы при равномерном прямолинейном движении
Тогда скорость движения (v) будет вычисляться по формуле:
Так как △r – вектор, △t – скаляр, скорость v тоже будет вектором, сонаправленным перемещению.
Если тело начинает двигаться в момент начала отсчета, то △t = t*. Из правила сложения векторов следует, что △r = r1 — r0. Тогда выражение для скорости можно переписать в виде:
Из этого выражения следует:
Это выражение можно применить к любому произвольно взятому моменту времени, поэтому можно опустить индекс в левой части и переписать:
Данное уравнение является уравнением движения при прямолинейном равномерном движении.
*Напоминание: символом △ (дельта) обозначают изменение какой-нибудь величины. Например △t = t – t1, где t – конечный момент времени, t1 – начальный. Если же начальный момент времени совпадает с началом отсчета t1 = 0, то △t = t – 0 = t.
Фактически уравнение равномерного прямолинейного движения означает, что радиус-вектор в произвольный момент времени t можно посчитать, сложив начальный радиус-вектор и приращение v*t.
Найдя проекции радиус-вектора и вектора скорости, можно разложить уравнение движения тела на три составляющие вдоль осей ОX, ОY и ОZ.
В этих выражениях r0x, r0y, r0z и vx, vy, vz – это компоненты изначальных векторов r0 и v вдоль осей ОХ, ОY и ОZ соответственно. И теперь можно перейти к скалярному виду:
Стоит отметить, что при проецировании какие-то компоненты вектора могут стать отрицательными, тогда знаки в выражениях поменяются на противоположные.
В рассмотренном выше примере движение происходит только вдоль оси ОХ (остальные координаты не изменяются). На рисунке 9 приведены проекции начальной (х0) и конечной (х1) точки на ось ОХ.
Рисунок 9 – Перемещение тела в координатном представлении
Уравнение координаты (х) движения будет выглядеть:
А это уже похоже на знакомую из прошедшего курса физики формулу для нахождения пути:
Если точка начала двигаться из начала отсчета S0 = 0, можно переписать эту формулу в виде:
Отсюда следуют известные уже формулы для нахождения скорости и времени при равномерном прямолинейном движении:
Приведем последний в этой статье пример: известно, что тело движется вдоль оси ОХ, начиная из точки x0 = 3 см. Скорость тела равна v = 5 м/с и направлена вдоль оси ОХ. Необходимо записать уравнение движения по координате х для этого тела.
Итак, для начала приведем все единицы измерения к СИ:
Теперь можно записывать уравнение для координаты х:
Из этого уравнения можно найти координату тела в любой момент времени. Например, через 2 секунды после начала отсчета тело находилось в точке:
x(2) = 0,03 + 5*2 = 10, 03.
А какой путь прошло тело к этому моменту? В начале оно находилось в точке x(2) = 0,03 м, а через 2 секунды оно стало находиться в точке x(2) = 10, 03. Значит за 2 секунды тело прошло:
S = x(2) – x0 = 10, 03 – 0,03 = 10 м.
А если скорость тела была направлена противоположно оси ОХ, как тогда выглядело бы уравнение движения?
Тогда проекция вектора скорости на ось ОХ была бы отрицательной и в уравнении знак перед скоростью поменялся бы на противоположный:
http://b4.cooksy.ru/articles/kak-nayti-radius-vektora
Координаты точки, радиус- вектор точки, произвольные вектора. Длина вектора.
Возьмем
в пространстве произвольную точку М(х,
у, z).
Первая координата х
– абсцисса ‒ это проекция т. М на ось
ОХ. Вторая у
– ордината – это проекция т. М на ось
ОУ. Третья z
– аппликата – на ось OZ.
М
α
N

Проекция
т. М на α
Чтобы
найти проекцию точки на прямую, нужно
через точку провести плоскость
перпендикулярно этой прямой.
Определение:
Вектор, соединяющий начало координат
т. О
с произвольной точкой пространства
называется радиус-
вектор этой точки.
Радиус-
вектор т. М – ОМ.
Найдем
координаты радиус-вектора ОМ:
ОА=
xi,
ОВ= yj,
ОС= zk.
OM=
OP+ PM= OA+ OB+ OC= xi+ yj+ zk= (x, y, z).
Вывод:
координаты радиус-вектора точки совпадают
с координатами самой точки ОМ= (x,
y,
z).
Вектор
ОМ является диагональю параллелепипеда,
по свойству диагоналей d2=
a2+
b2+
c2
. Отсюда
следует, что │ОМ│2=
x2+
y2+
z2.
Извлекая, квадратный корень получаем
длину

.
Возьмем
две произвольные точки т. А(x1,
y1,
z1)
и т. В (x2,
y2,
z2).
Соединим АВ.

Вспомогательные
векторы: ОА= (x1,
y1,
z1),
ОВ= (x2,
y2,
z2).
АВ=
ОВ
— ОА=
(x2,
y2,
z2)-
(x1,
y1,
z1)=
(x2—
x1,
, y2—
y1,
z2—
z1).
Вывод:
чтобы найти координаты вектора нужно
из координат конца вектора вычесть
соответствующие координаты начала
вектора.
АВ=
(x2—
x1,
, y2—
y1,
z2—
z1).
Пример.
Даны 3 точки
т. А(2,-1,3), т. В(4,0,1), т. С(-1,2,1). Найти АВ и его
длину │АВ│, m=
AB-
2BC.
Проекция вектора на ось.
Определение:
Проекцией
вектора на ось
называется число, модуль которого равен
проекции на эту ось отрезка, задающего
вектор, причем число берется со знаком
«+», если координата конца вектора больше
координаты начала вектора, и со знаком
«-», если координата начала больше
координаты конца.
Через
т. А и т. В проведем плоскости перпендикулярные
оси l,
и найдем точки пересечения плоскости
с осью.
Перенесем
вектор АВ в точку А1.
А1В1(проекция)=АВ.
Из прямоугольного треугольника следует,
что проекция АВ на ось l
будет равна:
│АВ│·
cos
φ=
прl
AB.
прl
AB=│АВ│·
cos
φ,
где φ
— это угол между вектором и осью.
Возможны
3 случая:
1)
φ-
острый, прl
AB>
0, т.к. cos
φ>
0.

2)
φ-
тупой, прl
AB<
0, т.к. cos
φ<
0.

3)
φ=
90°, прl
AB=
0, т.к. cos
φ=
0.

Теоремы о проекциях.
Теорема
1. прl(а
+ b)=
прl
a
+ прl
b.
Теорема
2. прl
(λа)=
λ прl
а.
Связь между координатами вектора и проекциями вектора на координатной оси.

прOY
АВ= y1—
y2,
прOX
АВ= x1—
x2,
прOZ
АВ= z1—
z2.
Вывод:
проекции вектора на координатные оси
совпадают с координатами вектора.
Условие коллинеарности двух векторов.

Возьмем
два коллинеарных вектора а=
(ах,
ау,
аz)
║b=
(bx,
by,
bz).
b=
λa.
В
координатной форме:
Сравнивая
соответствующие координаты первые,
вторые и третьи получим:






.
Условие
коллинеарности:
Для коллинеарности двух векторов
необходимо и достаточно, чтобы их
соответствующие координаты были
пропорциональны.
Замечание:
если одна из координат вектора равна
0, то у коллинеарного вектора соответствующая
координата тоже равна 0.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Радиус-вектор – это вектор, начало которого совпадает с точкой (0 ; 0) — началом координат.
Почему радиус-вектор так называют
Если начертить окружность с центром в точке (0 ; 0), этот вектор станет её радиусом.
Любой вектор можно превратить в радиус-вектор. Для этого сдвигаем его так, чтобы начало этого вектора совместить с точкой (0 ; 0).
Рис. 1. Вектор (красный) сдвинули параллельным переносом так, чтобы его начало совместилось с началом координат, получили радиус-вектор (черный)
При этом, помним: перемещать вектор можно, а поворачивать его нельзя!
Чем радиус-вектор удобен для использования
Чтобы найти координаты вектора, нужно найти разности соответственных координат точек, расположенных в конце и начале вектора.
Для радиус-вектора вычислять координаты не нужно. Можно воспользоваться правилом:
Координаты радиус-вектора — это координаты его конечной точки.
Рис. 2. Координаты конечной точки вектора (левая часть рисунка) совпадают с координатами вектора (правая часть рисунка)
Сравните координаты конечной точки и координаты вектора на рисунке 2.
Радиус-вектор
Можно встретить удачные и неудачные жилые массивы: в первых ветра практически нет, независимо от погоды, а во вторых, наоборот, есть почти всегда. Это зависит от того, были ли учтены при проектировании направление и сила ветра, который преимущественно дует в данном районе. Эту информацию нужно использовать при строительстве не только жилых районов, но и аэродромов, дорог и т. д.
Чтобы ее получить, на основании многолетних наблюдений, наносят направления ветра на так называемую розу ветров (см. рис. 1). Чем чаще дует ветер в данном направлении, тем дальше соответствующая точка от точки ![]() (см. рис. 2).
(см. рис. 2).

Рис. 1. Роза ветров

Рис. 2. Чем чаще дует ветер в данном направлении, тем дальше соответствующая точка от точки ![]()
Рассмотрим декартову систему координат с центром в точке ![]() на плоскости. Соединяя точку
на плоскости. Соединяя точку ![]() с точкой розы ветров вдоль выбранного направления
с точкой розы ветров вдоль выбранного направления ![]() получаем вектор, который называется радиус-вектором (см. рис. 3) (чем длиннее радиус-вектор, тем чаще ветер в данной местности дует вдоль его направления).
получаем вектор, который называется радиус-вектором (см. рис. 3) (чем длиннее радиус-вектор, тем чаще ветер в данной местности дует вдоль его направления).

Рис. 3. Радиус-вектор ![]()
Название «радиус-вектор» понятно – как и радиус окружности, начало любого радиус-вектора зафиксировано в одной точке, центре (начале координат) (см. рис. 4).

Рис. 4. Начало любого радиус-вектора зафиксировано в начале координат
Координаты радиус-вектора
Как описать этот вектор алгебраически? Любой точке на плоскости будет соответствовать ровно один радиус-вектор (см. рис. 5) (говорят, что точка ![]() и радиус-вектор
и радиус-вектор ![]() однозначно задают друг друга).
однозначно задают друг друга).

Рис. 5. Любой точке на плоскости соответствует ровно один радиус-вектор
Сама же точка однозначно задается своими координатами. Т. е. координаты ![]() точки
точки ![]() задают и саму точку, и радиус-вектор
задают и саму точку, и радиус-вектор ![]() (см. рис. 6).
(см. рис. 6).

Рис. 6. Координаты ![]() точки
точки ![]() задают и саму точку, и радиус-вектор
задают и саму точку, и радиус-вектор ![]()
Но тогда почему бы координаты точки ![]() не принять и за координаты радиус-вектора
не принять и за координаты радиус-вектора ![]() ? Именно так мы и поступим. Будем называть координатами радиус-вектора
? Именно так мы и поступим. Будем называть координатами радиус-вектора![]() координаты
координаты ![]() его конца
его конца ![]() :
:
![]()
Координаты произвольного вектора
Мы говорили, что векторы равны (см. рис. 7), если у них равны длины и они сонаправлены:![]()

Рис. 7. Равные векторы ![]() и
и ![]()
Понятно, что у равных векторов должны быть равны и координаты:
![]()
Рассмотрим произвольный вектор ![]() (см. рис. 8).
(см. рис. 8).

Рис. 8. Произвольный вектор ![]()
Построим вектор ![]() так, чтобы:
так, чтобы:
![]()
![]()
Получаем параллелограмм ![]() (см. рис. 9) (по признаку – две противоположные стороны равны и параллельны).
(см. рис. 9) (по признаку – две противоположные стороны равны и параллельны).

Рис. 9. Параллелограмм ![]()
Векторы ![]() (по построению), значит, координаты вектора
(по построению), значит, координаты вектора ![]() равны координатам радиус-вектора
равны координатам радиус-вектора ![]() и, соответственно, равны координатам точки
и, соответственно, равны координатам точки ![]() :
:
![]()
![]()
Как видим, любому вектору на плоскости можно поставить в соответствие упорядоченную пару чисел – его координаты.
Однозначное определение координат вектора
Понятно, что координаты вектора должны однозначно определяться координатами его конца и начала (т. к. начало и конец задают сам вектор).Попробуем определить, как именно.
Пусть точки ![]() и
и ![]() из нашего предыдущего примера имеют координаты, соответственно,
из нашего предыдущего примера имеют координаты, соответственно, ![]() и
и ![]() . Вычислим координаты точки
. Вычислим координаты точки ![]() , такой что радиус-вектор
, такой что радиус-вектор ![]() (см. рис. 10).
(см. рис. 10).

Рис. 10. Радиус-вектор ![]() , где
, где ![]() ,
, ![]()
Чтобы из точки ![]() попасть в точку
попасть в точку ![]() , нужно передвинуться на
, нужно передвинуться на ![]() единиц вправо и на
единиц вправо и на ![]() вверх (см. рис. 11).
вверх (см. рис. 11).

Рис. 11. Путь из точки ![]() в точку
в точку ![]()
Такое же перемещение из начала координат приведет нас в точку ![]() (см. рис. 12).
(см. рис. 12).

Рис. 12. Путь из точки ![]() в точку
в точку ![]()
Значит, координаты радиус-вектора ![]() . Тогда и координаты равного ему вектора
. Тогда и координаты равного ему вектора ![]() .
.
Уберем вспомогательный радиус-вектор ![]() и попробуем определить координаты вектора
и попробуем определить координаты вектора ![]() без его помощи. Чтобы переместиться их точки
без его помощи. Чтобы переместиться их точки ![]() в точку
в точку ![]() , нам нужно переместиться на
, нам нужно переместиться на ![]() единиц вправо и на
единиц вправо и на ![]() вверх – это и будут координаты вектора
вверх – это и будут координаты вектора ![]() (см. рис. 13).
(см. рис. 13).

Рис. 13. Чтобы переместиться их точки ![]() в точку
в точку ![]() , нужно переместиться на
, нужно переместиться на ![]() единиц вправо и на
единиц вправо и на ![]() вверх
вверх
Связанные и свободные векторы
Чтобы определить координаты радиус-вектора ![]() , нам было достаточно двух чисел – координат точки
, нам было достаточно двух чисел – координат точки ![]() . Чтобы определить координаты произвольного вектора
. Чтобы определить координаты произвольного вектора ![]() – уже четыре числа: координаты точек
– уже четыре числа: координаты точек ![]() и
и ![]() . Есть ли в этом противоречие?
. Есть ли в этом противоречие?
Конечно, нет. В определении радиус-вектора уже «спрятаны» две дополнительные координаты – его начало всегда совпадает с точкой ![]() , координаты которой мы знаем –
, координаты которой мы знаем –![]() . Если перемещение из точки
. Если перемещение из точки ![]() в точку
в точку ![]() по горизонтали мы искали как разность:
по горизонтали мы искали как разность: ![]() , то из точки
, то из точки ![]() в точку
в точку ![]() , как
, как ![]() . Но т. к. вычитание нуля не меняет число, то мы приравняли координаты радиус-вектора к координатам его конца (в этом удобство радиус-векторов).
. Но т. к. вычитание нуля не меняет число, то мы приравняли координаты радиус-вектора к координатам его конца (в этом удобство радиус-векторов).
Однако все же здесь есть о чем поговорить. Мы поставили в соответствие любому вектору на плоскости упорядоченную пару чисел – его координаты. Однако, вектор – направленный отрезок, который задается началом и концом. Но в этом случае, чтобы определить вектор, нужно знать четыре числа – координаты начала и конца. Так, набором из скольких чисел определяется вектор – из ![]() или
или ![]() ?
?
Рассмотрим пример из физики. Если в задаче мы можем рассматривать тело как материальную точку, то суммируем силы, которые на него действуют, независимо от точек их приложения (см. рис. 14).

Рис. 14. Если тело можно рассматривать как материальную точку, то можно суммировать силы, которые на него действуют, независимо от точек их приложения
Если же тело нельзя рассматривать как материальную точку (например, при вычислении вращающего момента), то складывать силы без учета точек их приложения уже нельзя (см. рис. 15).

Рис. 15. Если тело нельзя рассматривать как материальную точку, то нельзя суммировать силы, которые на него действуют, без учета точек их приложения
В первом случае силу можно рассматривать как пример так называемого свободного вектора, у которого начальную точку можно выбирать произвольно (или, что то же самое, которую можно произвольно переносить параллельно самим себе).
А во втором – уже как пример связанного вектора, у которого начальная точка фиксирована.
Понятно, что свободные векторы ![]() и
и ![]()
![]() – это не просто равные, а одинаковые векторы. А связанные векторы
– это не просто равные, а одинаковые векторы. А связанные векторы ![]() и
и ![]() – нет (т. к. у них разные начала). Поэтому для задания свободного вектора нужно гораздо меньше информации, чем для задания связанного. Действительно, связанный вектор можно задать двумя элементами: точкой отсчета и свободным вектором, который от нее откладывается (отсюда
– нет (т. к. у них разные начала). Поэтому для задания свободного вектора нужно гораздо меньше информации, чем для задания связанного. Действительно, связанный вектор можно задать двумя элементами: точкой отсчета и свободным вектором, который от нее откладывается (отсюда ![]() числа).
числа).
Все операции для свободных и связанных векторов определены одинаково. Единственное, для связанных векторов некоторые операции не определены, например сложение векторов с разными началами. Поэтому часто тип вектора явно не указывается.
В математике мы будем работать именно со свободными векторами (если не оговорено иное).
Нахождение координат вектора
Рассмотрим вектор ![]() (см. рис. 16).
(см. рис. 16).

Рис. 16. Вектор ![]()
Движемся из начала в конец: ![]() единица вправо и
единица вправо и ![]() единицы вверх. Координаты вектора (см. рис. 17):
единицы вверх. Координаты вектора (см. рис. 17):
![]()

Рис. 17. Вектор ![]()
Чтобы попасть из точки ![]() в точку
в точку ![]() , двигаемся на
, двигаемся на ![]() единицы вправо и на
единицы вправо и на ![]() вниз. Направление вниз у нас отрицательное, следовательно, координаты вектора (см. рис. 18):
вниз. Направление вниз у нас отрицательное, следовательно, координаты вектора (см. рис. 18):
![]()

Рис. 18. Вектор ![]()
Чтобы попасть из точки ![]() в точку
в точку ![]() , двигаемся на
, двигаемся на ![]() единиц влево (а это отрицательное направление оси
единиц влево (а это отрицательное направление оси ![]() ) и на
) и на ![]() вверх (положительное направление). Координаты вектора (см. рис. 19):
вверх (положительное направление). Координаты вектора (см. рис. 19):
![]()

Рис. 19. Вектор ![]()
Правило определения координат вектора по координатам его концов
Как мы уже сказали, у равных векторов координаты равны. Поэтому при определении координат неважно, где находится вектор, важны его длина и направление.
Мы сказали, что вектор однозначно задается началом и концом. Значит, по координатам этих двух точек можно определить координаты вектора. Как это сделать?
Рассмотрим вектор ![]() , где
, где ![]() , и найдем его координаты (см. рис. 20).
, и найдем его координаты (см. рис. 20).

Рис. 20. Вектор ![]() ,
, ![]()
Движемся из точки ![]() на
на ![]() единицы вправо (положительное направление) и на
единицы вправо (положительное направление) и на ![]() вверх (тоже положительное направление), получаем координаты вектора (см. рис. 21):
вверх (тоже положительное направление), получаем координаты вектора (см. рис. 21):
![]()

Рис. 21. Вектор ![]()
Абсцисса точки ![]() равна
равна ![]() , а точки
, а точки ![]() равна
равна ![]() . Мы двигались вправо на
. Мы двигались вправо на ![]() единицы, потому что
единицы, потому что ![]() . Это и есть первая координата вектора. Аналогично разность ординат двух точек:
. Это и есть первая координата вектора. Аналогично разность ординат двух точек: ![]() . Это и есть вторая координата.
. Это и есть вторая координата.
Получаем правило определения координат вектора по координатам его концов: координаты вектора равны разности соответствующих координат конца и начала вектора:
![]()
Вернемся к трем рассмотренным векторам из предыдущего примера.
1. ![]() :
:
![]()
![]()
Тогда:
![]()
2. ![]() :
:
![]()
![]()
Тогда:
![]()
3. ![]() :
:
![]()
![]()
Тогда:
![]()
Итак, чтобы найти координаты вектора, надо из координат конца вычесть координаты начала.
Пользуясь этим алгоритмом, несложно найти координаты нуль-вектора (у которого, напомним, начало и конец совпадают) – они равны ![]() .
.
Пусть даны координаты вектора ![]() . Изобразим его (см. рис. 22).
. Изобразим его (см. рис. 22).

Рис. 22. Вектор ![]()
Мы не знаем, где он находится. Начало этого вектора может быть в любой точке. Например, он может быть радиус-вектором и начинаться в точке ![]() . Тогда его конец будет в точке
. Тогда его конец будет в точке ![]() .
.

Рис. 23. Вектор ![]() , где
, где ![]()
Или он может начинаться в точке ![]() . Прибавим к координатам начала координаты векторы:
. Прибавим к координатам начала координаты векторы:
![]()
![]()
Координаты точки ![]() (см. рис. 24).
(см. рис. 24).

Рис. 24. Вектор ![]() , где
, где ![]()
Обратите внимание, что мы пользуемся для нахождения координат конца следствием из сформулированного правила:

Теперь у нас есть две интерпретации вектора:
- геометрическая: вектор – это направленный отрезок;
- алгебраическая: если задана система координат, то вектор на плоскости – это упорядоченная пара чисел.
Теперь мы можем использовать обе интерпретации при работе с векторами.
Длина вектора
Раз вектор однозначно определяется своими координатами, то по ним можно вычислить и главную его характеристику – длину. Вспомним, что длина вектора равна длине отрезка с теми же концами.
Но на прошлом уроке мы доказывали, что длина отрезка ![]() , у которого
, у которого ![]() , равна:
, равна:
![]()
Но ![]() – координаты вектора
– координаты вектора ![]() . Получаем, что длина вектора
. Получаем, что длина вектора ![]() равна квадратному корню из суммы квадратов его координат:
равна квадратному корню из суммы квадратов его координат:
![]()
Эту же формулу можно получить и по-другому: если построить прямоугольный треугольник, у которого вектор – это гипотенуза, то его катеты – это длины проекций вектора на оси координат, т. е. модули координат вектора (см. рис. 25).

Рис. 25. Прямоугольный треугольник, у которого вектор – гипотенуза, а катеты – модули координат вектора
Тогда достаточно использовать теорему Пифагора, чтобы получить формулу:
![]()
Например, длина вектора ![]() равна:
равна:
![]()
Координаты суммы векторов
Рассмотрим теперь различные операции с векторами. Мы уже умеем складывать векторы геометрически, используя правила треугольника или параллелограмма.
Вот два вектора (см. рис. 26): начало вектора ![]() имеет координаты
имеет координаты ![]() , а конец –
, а конец – ![]() ; начало вектора
; начало вектора ![]() имеет координаты
имеет координаты ![]() , конец –
, конец – ![]() .
.

Рис. 26. Векторы ![]() и
и ![]()
Нетрудно посчитать координаты каждого вектора: из координат конца вычитаем координаты начала:
![]()
![]()
Чтобы сложить эти два вектора по правилу треугольника, нужно перенести их так, чтобы конец одного совместился с началом другого. Переместим вектор ![]() так, чтобы его начало оказалось в начале координат. Его конец переместится тогда в точку
так, чтобы его начало оказалось в начале координат. Его конец переместится тогда в точку ![]() (см. рис. 27).
(см. рис. 27).

Рис. 27. Вектор ![]() перемещен так, что его начало находится в начале координат
перемещен так, что его начало находится в начале координат
Переместим в эту точку начало вектора ![]() (см. рис. 28).
(см. рис. 28).

Рис. 28. Начало вектора ![]() перемещено в конец вектора
перемещено в конец вектора ![]() – точку
– точку ![]()
Получим новый вектор, равный сумме ![]() по правилу треугольника (см. рис. 29).
по правилу треугольника (см. рис. 29).

Рис. 29. Сложение векторов по правилу треугольника
Т. к. новый вектор является радиус-вектором, то его координаты совпадают с координатами его конца. Как же найти эти координаты?
Найдем координаты конца вектора ![]() . Мы знаем координаты начала этого вектора –
. Мы знаем координаты начала этого вектора – ![]() . Знаем координаты самого вектора
. Знаем координаты самого вектора ![]() . И знаем, что координаты вектора – это координаты конца минус координаты начала:
. И знаем, что координаты вектора – это координаты конца минус координаты начала:
![]()
![]()
Тогда:
![]()
![]()
Получаем координаты точки ![]() . И, соответственно, координаты вектора:
. И, соответственно, координаты вектора:
![]()
Можно заметить, что координаты вектора суммы равны сумме координат исходных векторов: ![]() ,
, ![]() . Это не случайность.
. Это не случайность.
Пусть у нас есть произвольные векторы с координатами ![]() и
и ![]() (см. рис. 30).
(см. рис. 30).

Рис. 30. Произвольные векторы ![]() и
и ![]()
Повторим те же операции, что и в рассмотренном примере: первый вектор отложим от начала координат, второй – от конца первого (см. рис. 31).

Рис. 31. Вектор ![]() отложен от начала координат, вектор
отложен от начала координат, вектор ![]() – от конца вектора
– от конца вектора ![]()
Тогда точка ![]() , точка
, точка ![]() , координаты вектора
, координаты вектора ![]() :
:
![]()
![]()
Получаем:
![]()
![]()
Итак, чтобы найти координаты суммы двух векторов, нужно сложить их соответствующие координаты:
![]()
Пример 1. Найти сумму векторов ![]() и
и ![]() .
.
Решение.
Сумма векторов:
![]()
Ответ: ![]() .
.
Несложно доказать, что координаты суммы нескольких векторов – это суммы соответствующих координат всех векторов (например, если складываем три вектора – складываем любые два из них, получаем сумму уже двух векторов, их координаты снова нужно сложить – в итоге получаем сумму координат всех трех векторов).
Пример 2. Найти сумму векторов ![]() ,
, ![]() и
и ![]() .
.
Решение.
Получаем:
![]()
Ответ: ![]() .
.
Координаты разности векторов
С вычитанием дело обстоит ничуть не сложнее. Если для векторов ![]() выполняется:
выполняется:
![]()
То:
![]()
При этом:
![]()
Аналогично:
![]()
Получаем, что координаты разности двух векторов равны разностям соответствующих координат векторов:
![]()
Пример 3. Найти разность векторов ![]() и
и ![]() .
.
Решение.
Получаем:
![]()
Ответ: ![]() .
.
Координаты вектора, умноженного на число
Что происходит с координатами вектора при умножении их на число? Умножим вектор ![]() на
на ![]() . Вектор
. Вектор ![]() в два раза длиннее вектора
в два раза длиннее вектора ![]() и направлен в ту же сторону. Нетрудно увидеть, что каждая его координата тоже в два раза больше, чем у вектора
и направлен в ту же сторону. Нетрудно увидеть, что каждая его координата тоже в два раза больше, чем у вектора ![]() (см. рис. 32):
(см. рис. 32):
![]()

Рис. 32. Вектор ![]() в два раза длиннее вектора
в два раза длиннее вектора ![]()
Чтобы умножить вектор на число, нужно обе координаты вектора умножить на это число:
![]()
Это, скорее, геометрическое рассуждение. Но тот же результат можно получить и алгебраически:
![]()
Теперь мы можем сказать, что вектор:
![]()
Свойства операций с векторами
В качестве самостоятельного упражнения докажите следующие свойства операций с векторами:
При объяснении попробуйте это сделать с двух точек зрения:
- геометрической (с помощью изображения векторов как направленных отрезков, правил треугольника и параллелограмма, геометрического смысла умножения вектора на число);
- алгебраической (с помощью координат, правил сложения координат векторов, умножения координат на число).
Чтобы проверить себя или узнать доказательство свойств, которые вызвали у вас затруднения, ознакомьтесь с доказательствами ниже.
Доказательство свойств
1. ![]() .
.
В координатах все просто:
![]()
![]()
Верно.
Геометрическое доказательство также не составит труда, если помнить, что у нуль-вектора начало и конец совпадают (дальше можно использовать правило треугольника для сложения векторов) (см. рис. 33):
![]()
![]()

Рис. 33. Правило треугольника
2. ![]() .
.
Геометрическое доказательство можно провести с использованием правила параллелограмма (совместив начала векторов) – в обоих случаях получится один и тот же параллелограмм, а значит, и диагонали будут одинаковыми (см. рис. 34).

Рис. 34. Правило параллелограмма
В координатах все тоже несложно:
![]()
![]()
3. ![]() .
.
Геометрическое доказательство можно провести, дважды используя правило треугольника (см. рис. 35).

Рис. 35. Использование правила треугольника дважды
По пути мы начали доказывать обобщение правила треугольника – правило многоугольника. Сумма векторов, конец каждого из которых является началом следующего, – это вектор, соединяющий начало первого вектора с концом последнего.
В координатах все легко:
![]()
Верно.
4. ![]() .
.
В координатах все легко:
![]()
Геометрически: при умножении на число векторы сонаправлены (значит, правый и левый векторы сонаправлены) (см. рис. 36).

Рис. 36. Сонаправленные векторы
Длины обоих векторов будут равны:
![]()
Значит, векторы равны (равны длины и сонаправлены).
5. ![]() .
.
В координатах:
![]()
Аналогично:
![]()
Геометрически: при умножении на число векторы сонаправлены (значит, левый и правый векторы сонаправлены). Длина левого вектора:
![]()
Длина правого вектора:
![]()
Значит, векторы равны (равны длины и сонаправлены).
6. ![]() .
.
Геометрически: сначала складываем векторы, затем умножаем на ![]() – удлиняем диагональ в
– удлиняем диагональ в ![]() раз. Справа – сначала удлиняем стороны параллелограмма, затем строим диагональ – получается та же диагональ, значит, векторы равны (см. рис. 37).
раз. Справа – сначала удлиняем стороны параллелограмма, затем строим диагональ – получается та же диагональ, значит, векторы равны (см. рис. 37).

Рис. 37. Равные векторы ![]() и
и ![]()
В координатах:
![]()
![]()
Список литературы
- Александров А.Д., Вернер А.Л., Рыжик В.И. Геометрия, 9 класс. Учебник. – М.: «Просвещение», 2017.
- Бутузов В.Ф., Кадомцев С.Б., Прасолов В.В./Под ред. Садовничего В.А. Геометрия, 9 класс. Учебник. – М.: «Просвещение», 2018.
- Мерзляк А.Г., Полонский В.Б., Якир М.С., Геометрия, 9 класс. Учебник. – М.: издательский центр «ВЕНТАНА-ГРАФ», 2018.
Дополнительные рекомендованные ссылки на ресурсы сети Интернет
- Интернет-портал yaklass.ru (Источник)
- Интернет-портал ru.solverbook.com (Источник)
- Интернет-портал cleverstudents.ru (Источник)
Домашнее задание
1. Найти координаты и длину вектора ![]() , если
, если ![]() .
.
2. Найти координаты векторов![]() , если
, если ![]() .
.
3. Упростить выражение:
![]()
Главная > Геометрия 9 класс > Радиус вектор
Радиус вектор — видеоурок
На этом видео уроке по геометрии для 9 класса объясняется:
— что такое радиус-вектор
— как определить координаты радиус-вектора зная координаты точки к которой вектор проведен
— как определить координаты вектора зная координаты точек начала и конца вектора
— решаются задачи 934 и 935 из учебника Атанасяна на нахождение координат вектора