Легче всего решать задачу, если все приложенные к телу силы параллельны – тогда можно получить ответ, используя лишь правило моментов. Если же силы непараллельные, то иногда для получения ответа требуется дополнительно применять второй закон Ньютона.
Параллельные силы
Алгоритм решения задач на правило моментов (параллельные силы)
- Выполнить чертеж. Указать на нем все силы с точкой их приложения и направлением действия. В этом вам поможет таблица.
| Сила | Точка приложения | Направление |
| Сила тяжести, действующая на груз | Центр груза | Вертикально вниз |
| Сила тяжести, действующая на однородный стержень | Центр тяжести | Вертикально вниз |
| Сила тяжести, действующая на неоднородный стержень | Центр масс, положение которого указывают в условии задачи | Вертикально вниз |
| Вес | Точка опоры или подвеса | Вес тела направлен противоположно вектору силы нормальной реакции опоры или вектору силы натяжения подвеса |
| Сила реакции опоры | Точка соприкосновения стержня и опоры | Перпендикулярно вверх |
| Сила натяжения нити | Точка соединения с подвесом | Вдоль оси подвеса |
- Выбрать положение оси вращения. Обычно ось выбирают в месте, где находится неизвестная сила или сила, искать которую не нужно.
- Указать значение плеч. Если в задаче нужно указать некоторое расстояние (к примеру, от центра стержня или от места приложения некоторой силы), то это расстояние следует обозначать за x. Размер плеч сил нужно определять с учетом размеров стержня и расстояния x.
- Записать правило моментов и решить задачу.
Типовы задачи на правило моментов при параллельных силах
| Прямая неоднородная балка длиной l и массой m подвешена за концы на вертикально натянутых тросах. Балка занимает горизонтальное положение. Найдите силу натяжения первого троса T2, если центр тяжести балки находится на расстоянии a от левого конца балки. | 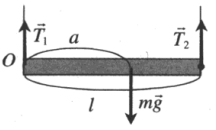
Для решения задачи в качестве положения оси вращения удобно выбрать точку приложения силы натяжения первого троса (потому что ее искать не нужно). Тогда плечом силы тяжести будет расстояние a, а плечом силы натяжения второго троса — l. Поэтому правило моментов можно записать так: T2l = mga T2 = mga/l |
| Рельс длиной l и массой m поднимают равномерно в горизонтальном положении на двух вертикальных тросах, первый из которых укреплен на конце рельса, а второй — на расстоянии x от другого конца. Определите натяжение второго троса. | 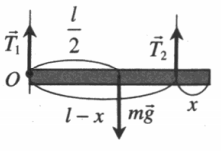
В этой задаче положение оси вращения также удобно выбрать в точке О, соответствующей точке приложения силы натяжения нити первого троса (так как ее искать не нужно). Тогда плечом силы натяжения второго троса будет служить разность длины рельса и расстояния x, а плечом силы тяжести — половина длины рельса. Поэтому правило моментов примет вид: mgl/2 = T2(l – x) T2 = mgl2(l−x) |
Пример №1. К левому концу невесомого стержня прикреплен груз массой 3 кг (см. рисунок). Стержень расположили на опоре, отстоящей от груза на 0,2 длины. Груз какой массы надо подвесить к правому концу, чтобы стержень находился в равновесии?
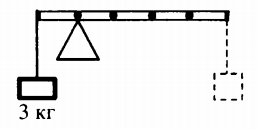
Условие равновесие будет выполняться, если произведение силы тяжести первого груза на ее плечо будет равно произведению силы тяжести второго груза на ее плечо:
Fтяж1d1 = Fтяж2d2
Согласно рисунку, второй груз будет подвешен на расстоянии 0,8 от опоры. Следовательно:
Fтяж2=Fтяж2d1d2=m1gd1d2
m2g=m1gd1d2
m2=m1d1d2=3·0,20,8=0,75 (кг)
Непараллельные силы
Алгоритм решения задач на правило моментов (непараллельные силы)
- Выполнить чертеж и указать все силы. Правильно определить точку приложения и направление сил поможет таблица:
| Сила | Точка приложения | Направление |
| Сила реакции опоры | Точка соприкосновения с опорой | Перпендикулярно плоскости опоры |
| Сила трения покоя | Точка соприкосновения с опорой | В сторону возможного движения |
| Сила тяжести | Центр масс (у однородных тел центр масс совпадает с центром тела) | Вертикально вниз |
| Архимедова сила | Центр масс погруженной части тела | Вертикально вверх |
- Определить плечи сил как кратчайшее расстояние между осью вращения и направлением действия силы.
- Записать правило моментов и решить задачу.
Внимание! Иногда для решения задачи может потребоваться использование второго закона Ньютона в проекциях на оси Ox и Oy.
Типовы задачи на правило моментов при непараллельных силах
| Рабочий удерживает за один конец доску массой m так, что она образует угол α с горизонтом, опираясь о землю другим концом. С какой силой рабочий удерживает доску, если эта сила перпендикулярна доске? | 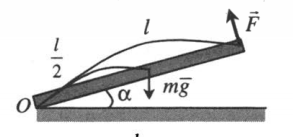
За точку равновесия примем точку касания доски с землей. Плечо силы тяжести будет равно нижнему катету треугольника, образованного при опускании перпендикуляра к земле из точки приложения этой силы: d1 = l cosα/2 Плечо силы, с которой рабочий поднимает доску, равно длине доски: d2 = l Отсюда: mglcosα2=Fl F=2lmglcosα=2mgcosα |
| В гладкий высокий цилиндрический стакан с внутренним радиусом R помещают карандаш длиной l и массой m. С какой силой действует на стакан верхний конец карандаша? | 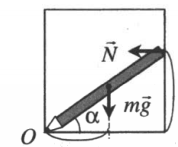
За точку равновесия примем нижнюю точку карандаша. Сила давления верхнего конца карандаша на стакан по модулю будет равна силе нормальной реакции опоры в этой точке. Поэтому плечо ее силы будет равно произведению длины карандаша на синус угла между ним и дном стакана: d1 = l sinα Минимальным расстоянием между линией действия силы тяжести и точкой равновесия будет половина произведения длины карандаша на косинус угла между ним и дном стакана: d2 = l сosα/2 Отсюда: Nl sinα = mgl сosα/2 N=mglcosα2lsinα Плечо силы тяжести также равно радиусу стакана, а плечо силы реакции опоры можно найти из теоремы Пифагора. Отсюда: N=mgR√l2−4R2 |
| Колесо радиусом R и массой m стоит перед ступенькой высотой h. Какую наименьшую горизонтальную силу надо приложить, чтобы оно могло подняться на ступеньку? Сила трения равна нулю. | 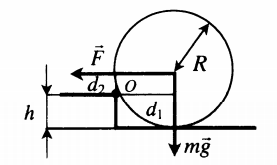
За точку равновесия примем точку касания колеса со ступенькой. Плечо силы тяжести является катетом треугольника, образованного с радиусом колеса и плечом прикладываемой силы. Плечо этой силы равно разности радиуса и высоты ступеньки. d1=√R2−d22 d2 = R – h Отсюда: mg√R2−d22=F(R−h) F=mg√R2−d22R−h=mg√h(2R−h)R−h |
| Лестница массой m приставлена к гладкой вертикальной стене пол углом α. Найдите силу давления лестницы на стену. Центр тяжести лестницы находится в ее середине. | 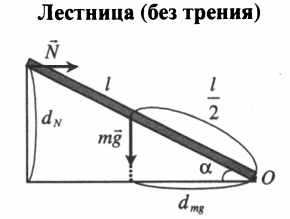
Плечо силы тяжести равно половине произведения длины лестницы на косинус угла α. Плечо силы реакции опоры равно произведению этой длины на синус α. Поэтому правило моментов записывается так: Nlsinα=mglcosα2 Отсюда: N=mglcosα2lsinα=mg2tanα |
| Лестница длиной l приставлена к идеально гладкой стене под углом α к горизонту. Коэффициент трения между лестницей и полом μ. На какое расстояние x вдоль лестницы может поднять человек, прежде чем лестница начнет скользить? Массой лестницы пренебречь. | 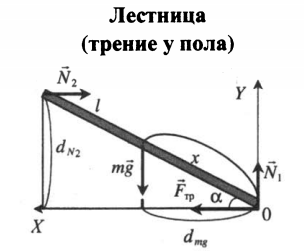
Правило моментов: mgxcosα=N2lsinα Второй закон Ньютона в проекциях на оси Ox и Oy соответственно: Fтр – N2 = 0 N1 – mg = 0 Сила трения: Fтр = μmg = N2 Следовательно: mgxcosα=μmglsinα x=μmglsinαmgxcosα=μltanα |
| Однородная лестница приставлена к стене. При каком наименьшем угле α между лестницей и горизонтальным полом лестница сохранит равновесие, если коэффициент трения между лестницей и полом μ1, а между лестницей и стеной — μ2? | 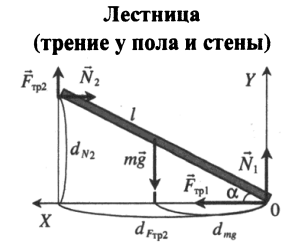
Правило моментов: mgl2cosα=Fтр2lcosα+N2lsinα Второй закон Ньютона в проекциях на ось Ox: Fтр1 – N2 = 0 μ1N1 – N2 = 0 На ось Oy: Fтр2 + N1 – mg = 0 μ2N2 +N2μ1 = mg N2(μ2+1μ1)=mg N2=mgμ2+1μ1=mgμ1μ1μ2+1 Fтр2=mg−N1=mg−N2μ1=mg−mgμ1μ2+1=mg(1−1μ1μ2+1) mgl2cosα=mg(1−1μ1μ2+1)lcosα+mgμ1μ1μ2+1lcosα Преобразуем выражение и получим: tanα=1−μ1μ21μ1 |
| Какую минимальную горизонтальную силу нужно приложить к верхнему ребру куба массой m, находящегося на горизонтальной плоскости, чтобы перекинуть его через нижнее ребро? | 
Правило моментов примет вид: mgl2cosα=Flsinα У куба угол α равен 45 градусам, а синус и косинус этого угла равны. Длины диагонали взаимоуничтожаются. Остается: F=mg2 |
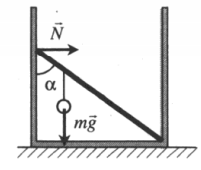
Пример №2. Невесомый стержень длиной 1 м, находящийся в ящике с гладким дном и стенками, составляет угол α = 45о с вертикалью (см. рисунок). К стержню на расстоянии 25 см от его левого конца подвешен на нити шар массой 2 кг. Каков модуль силы N, действующий на стержень со стороны левой стенки ящика?
25 см = 0,25 м
Пусть точкой равновесия будет точка касания нижнего конца стержня с дном ящика. Тогда плечом силы тяжести будет:
d1 = (l – 0,25)sinα
Плечом силы реакции опоры будет:
d2 = l cosα
Запишем правило моментов:
mg(l−0,25)sinα=Nlcosα
Отсюда:
N=mg(l−0,25)sinαlcosα
Так как косинус и синус угла 45о равны, получим:
N=mg(l−0,25)l=2·10(1−0,25)1=15 (Н)
Задание EF17982
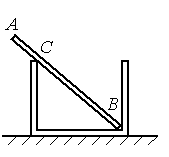 Однородный стержень АВ массой 100 г покоится, упираясь в стык дна и стенки банки концом В и опираясь на край банки в точке С (см. рисунок). Модуль силы, с которой стержень давит на стенку сосуда в точке С, равен 0,5 Н. Чему равен модуль горизонтальной составляющей силы, с которой стержень давит на сосуд в точке В, если модуль вертикальной составляющей этой силы равен 0,6 Н? Трением пренебречь.
Однородный стержень АВ массой 100 г покоится, упираясь в стык дна и стенки банки концом В и опираясь на край банки в точке С (см. рисунок). Модуль силы, с которой стержень давит на стенку сосуда в точке С, равен 0,5 Н. Чему равен модуль горизонтальной составляющей силы, с которой стержень давит на сосуд в точке В, если модуль вертикальной составляющей этой силы равен 0,6 Н? Трением пренебречь.
Ответ:
а) 0,3 Н
б) 0,25 Н
в) 0,6 Н
г) 0,13 Н
Алгоритм решения
- Записать исходные данные и перевести единицы измерения величин в СИ.
- Выполнить чертеж. Выбрать ось вращения. Указать силы и их плечи.
- Использовать второй и третий законы Ньютона, чтобы выполнить общее решение.
- Подставить известные данные и вычислить искомую величину.
Решение
Запишем исходные данные:
- Масса стержня: m = 100 г.
- Модуль силы, с которой стержень давит на стенку сосуда в точке С: FC = 0,5 Н.
- Модуль вертикальной составляющей силы, с которой стержень давит на сосуду в точке В: FBy = 0,6 Н.
Переведем единицы измерения в СИ:
100 г = 0,1 кг
Выполним чертеж:

Поскольку стержень покоится, согласно второму закону Ньютона, равнодействующая всех сил, действующих на него, должна быть равна нулю. На стержень действует три силы:
- сила тяжести (mg);
- сила реакции опоры в точке С (FC);
- сила реакции опоры в точке В (FВ).
Поэтому:
m→g+→FC+→FB=0
Запишем проекции на оси Ox и Oy соответственно:
FCx=FBx
FCy+FBy=mg
Модуль горизонтальной составляющей силы в точке В можно выразить через теорему Пифагора:
FCx=√F2C−F2Cy
Но вертикальная составляющая силы в точке C равна разности силы тяжести и горизонтальной составляющей силы в точке В:
FCy=mg−FBy
Отсюда:
FBx=FCx=√F2C−F2Cy=√F2C−(mg−FBy)2
Подставим известные данные и вычислим:
FBx=√0,52−(0,1·10−0,6)2=√0,25−0,16=0,3 (Н)
Ответ: а
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18697
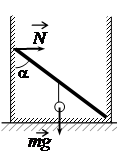 Невесомый стержень, находящийся в ящике с гладкими дном и стенками, составляет угол 45° с вертикалью (см. рисунок). К середине стержня подвешен на нити шарик массой 1 кг. Каков модуль силы упругости N, действующей на стержень со стороны левой стенки ящика?
Невесомый стержень, находящийся в ящике с гладкими дном и стенками, составляет угол 45° с вертикалью (см. рисунок). К середине стержня подвешен на нити шарик массой 1 кг. Каков модуль силы упругости N, действующей на стержень со стороны левой стенки ящика?
Алгоритм решения
1.Записать исходные данные.
2.Записать правило моментов.
3.Выполнить решение в общем виде.
4.Подставить известные данные и вычислить искомую величину.
Решение
Запишем исходные данные:
• Угол между стержнем и стенкой ящика: α = 45o.
• Масса шарика: m = 1 кг.
Чтобы записать правило моментов, нужно определить плечи силы тяжести и силы упругости. В качестве точки равновесия выберем точку опоры нижнего конца стержня. Тогда плечо силы тяжести будет равно произведению половины длины стержня на косинус угла между дном ящика и стержнем. Он тоже будет равен 45 градусам, так как он равен разности 180 градусов и угла α = 45o. Отсюда:
dmg=l2cosα
Плечо силы упругости будет равно расстоянию от дна ящика до верхней точки стержня. Оно определяется как произведение длины стержня на синус угла α:
dN=lsinα
Запишем правило моментов:
mgl2cosα=Nlsinα
Отсюда:
N=mgl2lsinαcosα
Длина стержня в числителе и знаменателе сократится, косинус и синус угла тоже, так как при 45 градусах они одинаковые. Следовательно:
N=mg2=1·102=5 (Н)
Ответ: 5
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 8k
Для определения момента инерции /г тела А относительно вертикальной оси Ог его прикрепили к упругому вертикальному стержню 00, закрутили этот стержень, повернув тело А вокруг оси Ог на малый угол фо, и отпустили период возникших колебаний оказался равным Т, момент сил упругости относительно оси Ог равен гпг = — сф. Для определения коэффициента с проделали второй опыт на стержень в точке О был надет однородный круглый диск радиуса г массы М, и тогда период колебаний оказался равным Определить момент инерции тела Д. [c.280]
Когда стержень подвергается деформации кручения, в сечениях, ограничивающих выделенный элемент длиной ds, действуют крутящие моменты Мкр (рис. 360), являющиеся по отношению к элементу внешними. Моменты сил упругости равны по величине моментам Мкр и направлены в > [c.367]
Таким образом, возникают крутильные колебания системы. На тело со стороны проволоки, закрученной на угол ф, действует момент сил упругости, пропорциональный этому углу [c.220]
Решение. Момент сил упругости выражается формулой [c.305]
При пропускании электрического тока через рамку сначала момент сил Ампера, вызывающий поворот рамки и связанной с ней подвижной части измерительной системы, превосходит момент сил упругости пружин 3, препятствующих повороту. Поэтому подвижная часть вращается с ускорением и к моменту достижения угла поворота, при котором наступает равенство моментов сил, приобретает запас кинетической энергии вращательного движения. За счет этой энергии подвижная система проходит положение равновесия, затем ее движение постепенно замедляется под действием возвращающих пружин. После остановки подвижная сис- [c.200]
Когда стержень подвергается деформации кручения, в сечениях, ограничивающих выделенный элемент длиной ds, действуют крутящие моменты Мкр (рис. 364), являющиеся по отношению к элементу внешними. Моменты сил упругости равны по величине моментам Мкр и направлены в противоположные стороны. Взаимный угол поворота сечений тп и гп п [c.389]
Скобка правой части множится на два, так как по симметрии сечения относительно оси с моменты сил упругости его нижней части около точки А равны моментам сил упругости его верхней части около этой точки. Силы упругости вращают сечение вокруг точки А в том же направлении, что и Qy, поэтому их моменты вошли в равенство со знаком плюс. Подставив в равенство (У.39) уравнения Т[ и тц, получим [c.167]
Моменты сил упругости на / и III участках вошли в это равенство со знаками минус, так как они вращают сечение вокруг [c.168]
Увеличение по сравнению с М р делает невозможным равновесие между моментами внешних пар и моментом сил упругости. Эпюр а р, соответствующий М- = М р, построен на рис. Х1У.6,в. Из эпюра (рис. Х1У.6,в) [c.401]
Для измерения моментов сил упругости при движении в элементе, связывающем две массы, измеряют напряжение на конденсаторе С, фиксируемое катодным осциллографом КО, на экране которого мож- [c.443]
Момент сил упругости, выпрямляющих стержень (см. гл. V), [c.213]
Приравнивая его моменту сил упругости, получим [c.218]
Обозначим через Мл момент движущих сил и через М момент сил сопротивления. Тогда уравнения движения двух рассматриваемых масс с учетом момента сил упругости вала получает вид [c.258]
Важнейшими динамическими характеристиками машинного агрегата являются а) равномерность вращения диска 2 (имитирующего выходное звено) б) момент сил упругости вала, соединяющего диски 1 и 2 в) вращающий момент двигателя. [c.71]
Для решения указанных задач необходимо построить амплитудные характеристики для относительной скорости диска 2 и момента сил упругости вала, представляющие собой установившиеся значения реакций системы на гармоническое возмущение. [c.71]
Исследование нагруженности соединительного вала. Отношение амплитуд момента сил упругости соединительного вала ( ) к соответствующему значению амплитуды момента нагружения М1, имеющее смысл коэффициента усиления по моменту, называют обычно коэффициентом динамичности Хм(й). В соответствии с формулой (9) получим [c.75]
Фа и — углы поворота двух смежных масс цепной механической системы — момент сил упругости участка валопровода между этими массами. [c.59]
Поскольку при анализе режимов наброса и сброса нагрузки интерес представляют неравномерность хода исполнительного звена и моменты сил упругости на всех участках валопровода, запишем для них передаточные функции в развернутом виде, воспользовавшись зависимостями (10.2)—(10.3), [c.66]
Знаки плюс в формулах (11.12)—(11.13) берутся при / = 1, знаки минус — при / = 2. Воспользовавшись общими зависимостями (11.6), приняв в них и = 2 г = 2, получим соответствующие формулы для переходных функций относительной скорости исполнительного звена Sa и момента сил упругости i/jj. [c.70]
На рис. 30, а — е, 31, а — е показаны примеры осциллограмм переходных функций для относительной скорости исполнительного звена и момента сил упругости машинного агрегата главного движения специального фрезерного станка, полученные на аналоговой вычислительной машине [29]. [c.73]
Анализ полученных результатов показывает, что отношение постоянных времени двигателя Vj-j является одной из важнейших динамических характеристик машинного агрегата чем больше значение тем сильнее переходные процессы в приводном двигателе влияют на динамические процессы в машинном агрегате. Скорость вращения исполнительного звена подвержена указанному влиянию в большей степени, чем момент сил упругости. [c.73]
Для переходной функции момента сил упругости соотношение [c.74]
На рис. 33, а — е показаны примеры осциллограмм относительной скорости исполнительного звена и момента сил упругости машинного агрегата с исходными параметрами предыдущего примера (стр. 73). Продолжительность нагружения Т изменялась в интервале Т Оч-0,15 сек. Расчеты показывают, что при Т > [c.76]
В соответствии с (6.30) найдем амплитудные характеристики для относительных скоростей всех масс машинного агрегата и для моментов сил упругости на участках между массами. Воспользуемся полученными выше выражениями (10.2), памятуя, что амплитудные характеристики определяются как модули передаточных функций на мнимой оси. [c.78]
Исследуем теперь нагруженность машинного агрегата, для чего определим коэффициент динамичности, имеющий смысл коэффициента усиления момента сил упругости, ср. с (6.39), [c.83]
Кроме того, определим коэффициент динамичности для двухмассовой механической системы без двигателя. Положим в системе уравнений движения (10.1) = 0. Передаточную функцию для момента сил упругости при принятых обозначениях (10.7) получим в виде [c.88]
Обозначим моменты сил упругости на участках в режиме оттормаживания [c.296]
Часовой балансир А может вращаться вокруг оси, перпендикулярной его плоскости и проходящей через центр тяжести О, имея относительно этой оси момент инерции J. Балансир приводится в движение спиральной пружиной, один конец которой с ним скреплен, а другой присоединен к неподвижному корпусу часов. При повороте балансира возникает момент сил упругости пружины, пропорциональный углу поворота. Момент, необходимый для за- кручивания пружины на один радиан, равен [c.280]
Твердое тело, подвешенное на упругой проволоке, совершает крутильные колебания под действием внешнего момента /Пе, причем /Пнг = Щ sin IDI + тз sin 3wi, где m , тз и со — постоянные, а г—ось, направленная вдоль проволоки. Момент сил упругости проволоки равен /Пупр, причем т рг = —с<р, где с — коэффициент упругости, а ф — угол закручивания. Определить закон вынужденных крутильных колебаний твердого тела, если его момент инерции относительно оси г равен J . Силами сопротивления движению пренебречь. Считать, что VV/г =i= со и л] ll Ф Зсо. [c.281]
Твердое тело, подвешенное к упругой проволоке, совершает крутильные колебания в жидкости. Момент инерции тела относительно оси проволоки г равен Д. Момент сил упругости проволоки Щупрг = — Сф, где с — коэффи-циент упругости, а ф — угол закручивания момент сопротивления движению гпсг = — РФ, где ф—угловая. скорость твердого тела, а р > 0. В начальный момент твердое тело было закручено на угол фо и отпущено без начальной скорости. Найти уравнение дви- [c.282]
Однородный круглый диск массы М и радиуса / , подвешенный к упругой проволоке, может совершать крутильные колебания в жидкости. Момент сил упругости проволоки ГПу р г = —Сф, где ось 2 проведена вдоль проволоки, с—коэффициент упругости, а ф — угол закручивания момент сопротивления движению гпсг = = —Рф, где ф — угловая скорость диска, а р > 0. В начальный момент диск был закручен на угол фо и отпущен без начальной скорости. Найти уравнение движения диска, если [c.282]
Твердое тело, подвешенное на упругой проволоке, совершает крутильные колебания под действием внешнего момента nis г = т.0 os pt, где то и р — положительные постоянные, гг — ось, направленная вдоль проволоки. Момент сил упругости проволоки Шупр г = —сф, где с — коэффициент упругости, а ф — угол закручивания. Момент инерции твердого тела относительно оси г равен /г- Силами сопротивления движению пренебречь. Определить уравнение движения твердого тела в случаях 1) р, [c.283]
Если отбросить нижнюю часть цилиндра и рассматривать равновесие верхней части, нагруженной моментом М, то и в этом случае в сечении / возникает момент сил упругости Л1кр, равный моменту внешних сил М. Условие равновесия верхней части имеет вид [c.188]
Отыщем теперь выражения передаточных функций для моментов сил упругости на участке между массами J и Jдля чего запишем очевидные соотношения [c.63]
Найдем переходные функцииг/(/) для относительной скорости исполнительного звена s t) и моментов сил упругости i/r-i, л на участках валопровода между массами (г = 2, 3, п), воспользовавшись формулой обращения Ри-мана—Меллина [72] [c.66]
Анализ выражений для экстремальных значений переходных функций относительной скорости выходного звена и момента сил упругости в соединении позволяет указать пути уменьшения динамических явлений при набросе нагрузки. В частности, для этого следует увеличивать момент инерции исполнительного звена J2, повышать демпфирование (т. е. увеличивать ipij), выбирать приводной двигатель с возможно меньшей постоянной времени и большей скоростью идеального холостого хода Оо- [c.74]
Режимы сброса нагрузки, рассматриваемые на основе линейных уравнений, представляют ограниченный интерес, особенно режимы полного сброса нагрузки в машинных агрегатах с передачами вследствие влияния зазоров. Если кинематические пары передаточных механизмов выполнены беззазорными, то относительную скорость исполнительного звена и моменты сил упругости в соединениях на участках между массами в режиме полного сброса нагрузки можно определить по формулам (6.28). Для машинного агрегата, схематизированного в виде двухмассовой системы, вос-пользовавп1Ись указанными формулами, получим [c.76]
Известно, что на все тела, находящиеся на Земле, действует сила тяжести, обусловленная гравитацией.
Какие ещё силы могут возникнуть? Рассмотрим несколько примеров.
(1). На яблоко в тарелке действует сила притяжения Земли. Фрукт не проваливается сквозь тарелку, а находится в покое.
Значит, существует сила, которая уравновешивает силу тяжести.
(2). Рассмотрим тело, подвешенное на нити. Сила тяжести будет направлена вниз.
Тело не может упасть, потому что силу тяжести компенсирует сила натяжения нити.
(3). Проведём опыт.
Позволим гире опуститься на середину доски на опорах.

Рис. (1). Гиря
Вес гири воздействует на доску и оказывает деформацию изгиба — заставляет сгибаться. Свойство упругости доски вызывает противоположную силу — силу реакции опоры — для того, чтобы вернуться в исходное, недеформированное состояние. Обе силы направлены вдоль одной прямой через центр масс гири, но направления противоположны, поэтому сумма сил равна нулю.
Под весом гири доска прогнулась — изменила свою форму.
Деформацией тела называют изменение размера или формы тела под воздействием внешних сил.
При изменении формы и размера под воздействием деформирующих сил каждое упругое тело пытается вернуться в начальное состояние.
Сила упругости — сила, которая возникает при деформации тела и стремится вернуть его в исходное состояние.
Сила упругости — векторная величина, обозначается (vec{F})(_{упр}).
Чем сильнее давит тело на опору, тем больше деформация и возникающая в ответ на деформацию сила упругости. Деформация опоры прекращается в тот момент, когда действующие по вертикали силы уравновесят друг друга (сила упругости станет равной силе тяжести).
Если исчезнет деформирующая сила, то исчезнет и сила упругости.
В зависимости от приложенных сил различают виды деформации:
-
деформация растяжения и сжатия;
-
деформация сдвига;
-
деформация изгиба;
-
деформация кручения.
Деформация называется упругой в случае, если тело полностью восстанавливает свою форму и объём после прекращения действия деформирующей силы.
(4). Рассмотрим силы, действующие в опыте с гирей, подвешенной на нити.

Рис. (2). Гиря на штативе
Синей стрелкой обозначен вектор силы тяжести (vec{F_2}), направленной к центру Земли (вертикально вниз). Силе тяжести противодействует сила упругости нити (vec{F_1}), называемая силой натяжения нити. Она обозначена красной стрелкой, направленной вверх.
Гиря не движется, значит, силы компенсируют друг друга, сила тяжести равна силе упругости: (vec{F_1}+vec{F_2}=0), но направлена противоположно.
Подвесом называют нить, на которую подвешивается тело. Обычно имеют в виду нерастяжимую прочную нить.
Подвесом может быть упругое тело: пружина, резина. Значит, оно может растягиваться (деформироваться) под действием силы тяжести тела. При растяжении длина подвеса изменяется на некоторую величину, которую называют удлинением: (Delta l=l-l_0), где (l_0) — начальная длина нити, а (l) — конечная длина.
Закон Гука: изменение длины тела при растяжении (или сжатии) прямо пропорционально модулю силы упругости
(Δl) — удлинение тела (изменение его длины),
(k) — коэффициент пропорциональности, называющийся жёсткостью (пружины), которая зависит от материала.
Закон Гука работает только в случае, если деформация была упругая.
Источники:
Рис. 1. Гиря. © ЯКласс.
Рис. 2. Гиря на штативе. © ЯКласс.

В этой главе …
- Изучаем закон Гука
- Осваиваем основы простого гармонического движения
- Изучаем особенности простого гармонического движения
- Измеряем энергию простого гармонического движения
- Вычисляем период колебаний маятника
Эта глава посвящена описанию еще одного типа движения, а именно: описанию периодического движения. Примерами такого движения являются колебания грузика на пружинке, качания маятника и даже прыжки с высоты с помощью эластичной веревки. В этой главе рассматриваются закономерности и особенности таких повторяющихся, т.е. периодических движений. Здесь мы научимся вычислять характеристики периодического движения: период колебаний пружинки и маятника, упругую энергию сжатой пружины и т.д.
Содержание
- Постигаем закон Гука
- Растягиваем и сжимаем пружины
- Изучаем особенности закона Гука
- Движется дальше: простое гармоническое движение
- Изучаем простое гармоническое движение по горизонтали и по вертикали
- Изучаем свойства простого гармонического движения
- Изучаем траекторию простого гармонического движения
- Определяем период простого гармонического движения
- Определяем скорость в простом гармоническом движении
- Определяем ускорение в простом гармоническом движении
- Определяем частоту колебаний груза на пружине
- Вычисляем энергию простого гармонического движения
- Качаемся вместе с маятником
Постигаем закон Гука
Все объекты природы могут деформироваться, т.е. менять свою форму или объем, под действием приложенной силы. Если такие деформации (т.е. изменения) исчезают после прекращения действия приложенной силы, то они называются упругими. Упругость играет важную роль в технике. Упругие пружины используются для гашения удара при посадке космического корабля на поверхность планеты. Свернутые в спираль упругие пластины применяются в заводных механизмах часов. Даже в мышеловке используется упругая деформация пружины.
Еще в XVII-M веке английский физик Роберт Гук, изучая упругие свойства разных материалов, вывел закон, названный его именем. Согласно закону Гука, для упругого деформирования материала требуется приложить силу, величина которой прямо пропорциональна его деформации. Например, чтобы растянуть пружину на величину ( x ), потребуется приложить внешнюю силу ( F_{вн} ), которая равна:

где ( k ) — это коэффициент пропорциональности.
Точнее говоря, вектор деформации ( mathbf{x} ) всегда направлен противоположно силе сопротивления пружины (или силе упругости) ( mathbf{F} ), а потому в векторную формулировку закона Гука обычно входит знак “минус”:

Растягиваем и сжимаем пружины
Следует помнить, что закон Гука относится только к упруго деформируемым материалам.
В реальном мире, помимо упругих деформаций, имеются еще и пластические деформации. Так называют деформации, которые остаются в объекте, хотя бы частично, даже после прекращения действия внешних сил. Если сила не превосходит некоторой известной величины, которая называется пределом упругости, то возникающая деформация будет пластической. Предел упругости имеет разные значения для разных материалов. Если деформируемый объект, например пружина, испытывает только упругие деформации, то его называют идеально упругим, например, идеально упругой пружиной. Коэффициент пропорциональности ( k ) в законе Гука ( F=kx ) называется коэффициентом упругости объекта, который зависит от материала объекта, его размеров и измеряется в Н/м.
Допустим, вам нужно спроектировать подвеску автомобиля массой 1000 кг, состоящую из 4 пружин, которые могут идеально упруго деформироваться на расстояние 0,5 м. Каким коэффициентом упругости должна обладать пружина, чтобы выдержать вес автомобиля?
Вес автомобиля равен ( mg ), где ( g ) — это ускорение свободного падения под действием силы гравитационного притяжения. Это значит, что на каждую пружину приходится вчетверо меньшая нагрузка ( mg/4 ).
Определим упругую деформацию пружины под действием этой нагрузки по формуле закона Гука:

т.е. коэффициент упругости равен:

Подставляя значения, получим:

Итак, чтобы выдержать вес автомобиля, потребуется пружина с коэффициентом упругости равным 4,9·103 Н/м. Не забудьте, что каждый элемент подвески автомобиля должен обладать определенным запасом прочности, чтобы выдерживать непредсказуемые превышения нагрузки, например на ухабах. Однако эта задача выходит за рамки данного курса.
Изучаем особенности закона Гука
Как уже упоминалось выше, в векторную формулировку закона Гука обычно входит знак “минус”:

Таким образом, знак “минус” выражает следующую особенность упругой деформации: сила упругости всегда противоположна деформации. На рис. 12.1 схематически показаны направления силы упругости и деформации при сжатии и растяжении пружины.
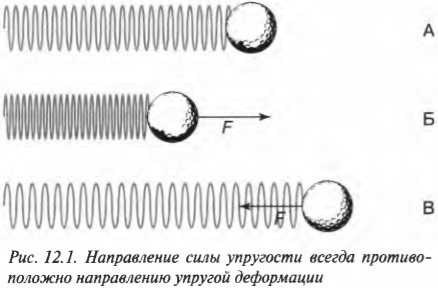
Как видите, при отсутствии растяжении или сжатия нет и деформации (см. схему А на рис. 12.1). Если пружина сжимается влево, то сила упругости направлена вправо (см. схему Б на рис. 12.1), а если пружина растягивается вправо, то сила упругости направлена влево (см. схему В на рис. 12.1).
Сила упругости пружины не зря называется силой сопротивления, ведь она стремится установить равновесие.
Движется дальше: простое гармоническое движение
Простым гармоническим движением называется такое движение, при котором сила сопротивления движению пропорциональна перемещению. При этом сила трения не учитывается, и никакие другие внешние силы не оказывают никакого влияния на движение. Такое движение будет выполняться периодически и бесконечно долго. Конечно же, в реальной ситуации так не бывает, но здесь имеется в виду именно идеализированная ситуация.
Изучаем простое гармоническое движение по горизонтали и по вертикали
На рис. 12.1 показан пример движения мячика, прикрепленного к пружине. При сжатии пружины внешней силой справа налево в пружине возникает сила упругости, которая стремится вернуть мячик в исходное положение. После возврата мячика в исходное положение он останавливается не сразу, а спустя какое-то время. Оно необходимо для торможения ускорившегося мячика с помощью силы упругости, возникающей при растягивании вправо. Дело в том, что мячик обладает некоторой массой, и инерция (см. главу 11) не позволяет ему остановиться мгновенно. В результате имеем следующую последовательность событий (см. рис. 12.1).
- Схема А. Мячик находится в состоянии равновесия. Никакие силы не действуют на него. Пружина находится в нерастянутом и в несжатом состоянии.
- Схема Б. Внешняя сила сжала пружину справа налево. В пружине возникла упругая сила сопротивления ( F ).
- Схема В. Внешняя сила отпускает пружину (и далее не участвует в процессе движения). Упругая сила сопротивления пружины ( F ) стремится распрямить пружину, т.е. вернуть мячик в исходное состояние. Мячик начинает ускоренное движение.
Когда мячик проходит точку исходного положения, его скорость становится очень большой (фактически максимальной) и он продолжает движение вправо. При этом возникает деформация растяжения и соответственно направленная противоположно упругая сила сопротивления пружины. Именно так и происходит при повторяющихся движениях мячика слева направо и, наоборот, справа налево. После первоначального толчка из неподвижного состояния мячик начинает совершать периодические колебания из самого крайнего левого положения в самое крайнее правое положение.
В примере на рис. 12.1 предполагается, что силы трения нет. А что будет, если пружинку с мячиком подвесить вертикально, как показано на рис. 12.2?
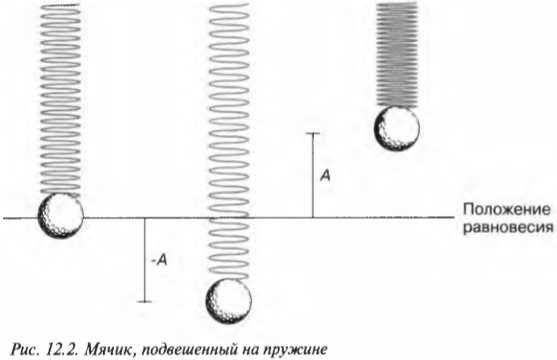
В подвешенном состоянии изменится положение равновесия, но после воздействия внешней силы мячик будет совершать аналогичные периодические движения, но теперь уже вверх-вниз.
Это новое равновесное положение определяется равенством веса мячика ( mg ) и силы упругости ( ky_0 ) растянутой пружины под действием этого веса:

Итак, новое положение исходного равновесия будет определяться формулой:

Теперь если потянуть мячик вниз с помощью внешней силы и отпустить мячик, то он начнет совершать периодическое движение, как и в прежнем примере (см. рис. 12.1), но теперь уже относительно нового положения равновесия.
Периодическое движение подобного рода называется периодическим колебанием, а крайние положения мячика при таком периодическом движении мячика называются амплитудами периодических колебаний. Амплитуда является важным элементом математического описания простого гармонического движения.
Изучаем свойства простого гармонического движения
Представьте себе, что для изучения простого гармонического движения ученые решили освещенный фонариком мячик из предыдущего примера заснять на движущуюся по горизонтали фотопленку.
После проявки фотопленки на ней оказался четкий волнообразный след, который показан на рис. 12.3.
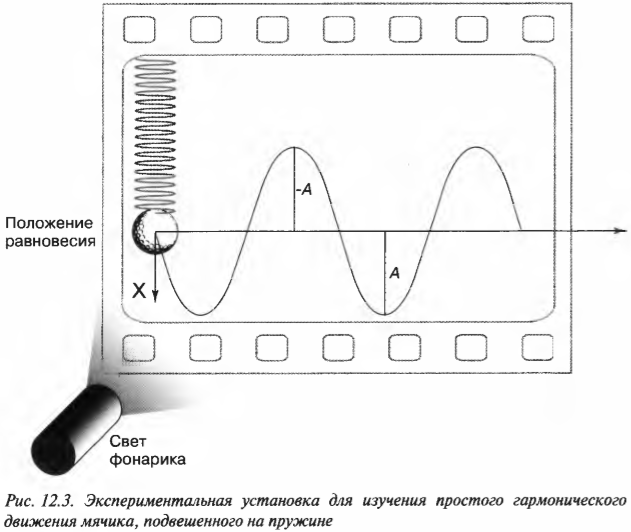
Оказывается, мячик действительно совершает периодические движения вверх-вниз относительно исходного равновесного положения с амплитудой А. Вблизи точки равновесия скорость мячика максимальна, а в точках амплитуды минимальна.
Траектория мячика очень похожа на синусоидальную кривую, т.е. след мячика на движущейся фотопленке описывается графиком функции ( sin ) (“синус”) либо ( cos ) (“косинус”) со сдвигом от начала координат. Действительно, решением уравнения простого гармонического движения является функция ( sin ) или ( cos ).
Изучаем траекторию простого гармонического движения
Построим и рассмотрим внимательно кривую функции:

Наверняка эта функция и ее графическое представление в виде синусоидальной кривой уже знакомо многим читателям этой книги из курса математики. Ее часто можно встретить на экранах разных приборов в реальной жизни или даже в виртуальном мире кино и компьютерных игр.
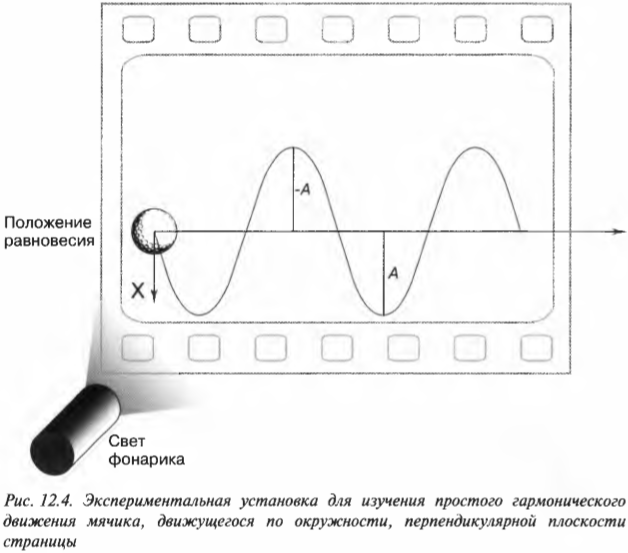
Пусть освещенный фонариком мячик движется по окружности перпендикулярной плоскости страницы и снимается на движущуюся по горизонтали фотопленку. Тогда после проявки фотопленки на ней снова появится синусоидальная кривая, как показано на рис. 12.4.
Если расположить окружность так, чтобы она была параллельна плоскости страницы (рис. 12.5), то можно легко заметить, что положение мячика определяется формулой:

где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( theta ) — это угол поворота мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
Если мячик вращается по окружности с постоянной угловой скоростью, то ( theta=omega t ) и ( x=Acos(omega t) ).
Определяем период простого гармонического движения
Прохождение мячиком пути, равного длине окружности, называется циклом, а время его прохождения — периодом. Период обозначается символом ( T ) и измеряется в секундах.
На рис. 12.4 и 12.5 полный цикл соответствует движению мячика от исходного положения с амплитудой ( A ), затем к положению с амплитудой ( -A ), а потом снова к положению с амплитудой ( A ).
Как связан период с уже знакомыми нам параметрами движения? За один цикл мячик проходит угол величиной ( 2pi ) за период ( T ), т.е. его угловая скорость равна:


Откуда получаем выражение для периода:

Для характеристики периодического движения часто используют понятие частота, которое равно количеству циклов за единицу времени. Например, если мячик на рис. 12.4 совершает 1000 полных оборотов в секунду, то его частота равна 1000 с-1. В системе СИ частоту измеряют в герцах (или сокращенно Гц), т.е. 1 с-1 = 1 Гц. Таким образом, частота вращения мячика по окружности равна 1000 Гц.
Частота ( f ) и период ( T ) связаны очень простым соотношением:

Поскольку:

то теперь можно легко найти связь между частотой и угловой скоростью:
При описании периодических движений угловую скорость ( omega ) часто называют циклической частотой.
Определяем скорость в простом гармоническом движении
На рис. 12.5 мячик совершает движение по окружности, а координата перемещения по оси X определяется формулой:
где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( omega ) — это угловая скорость мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
В любой точке с координатой х мячик обладает некоторой скоростью, которая зависит от времени. Как выразить ее с помощью математической формулы?
Очень просто, ведь для этого достаточно вспомнить о связи между угловой ( omega ) и тангенциальной ( v ) скоростью (см. главу 10):

Поскольку в данном случае ( r=A ), то в итоге получим для тангенциальной скорости:

Теперь для определения скорости периодических колебаний следа мячика по оси X на фотопленке нужно вычислить проекцию тангенциальной скорости на ось X:

(Здесь знак “минус” возникает, поскольку фотопленка движется вниз и ось Y направлена вниз, а потому угол ( beta ) между вектором скорости и осью X равен ( 180^circ+theta ), a ( sin(beta)=sin(180^circ+theta )=-sin(theta) ). — Примеч. ред.)
После подстановки выражений для ( theta=omega t ) и для ( v=Aomega ) получим:

Обратите внимание, что скорость меняется от исходного положения с амплитудой перемещения ( A ) и амплитудой скорости ( 0 ), затем к положению с амплитудой перемещения ( 0 ) и амплитудой скорости ( -Aomega ), потом к положению с амплитудой перемещения ( -A ) и амплитудой скорости ( 0 ), затем к положению с амплитудой перемещения ( 0 ) и амплитудой скорости ( Aomega ), а потом снова к положению с амплитудой перемещения ( A ) и амплитудой скорости ( 0 ).
Как видите, в простом гармоническом движении амплитуда скорости ( A_v=Aomega ) связана с амплитудой перемещения ( A_х=A ) формулой:

Рассмотрим следующий простой пример. Представьте себе, что несколько отчаянных парней и девушек прыгают с высоты с помощью эластичной веревки. Известно, что при прыжке с некоторой высоты относительно точки равновесия максимальная скорость в точке равновесия одного из смельчаков достигает величины 4 м/с. Он решает в 10 раз увеличить высоту прыжка. Какой будет его максимальная скорость в точке равновесия?
Итак, амплитуда скорости в первом прыжке ( A_{v1}=-A_{х1}omega ) равна 4 м/с. Амплитуда перемещения во втором прыжке (с новой высоты) в 10 раз больше амплитуды перемещения в начале, т.е. ( A_{х2}=10A_{х1} ). Вопрос: чему равна амплитуда скорости ( A_{v2}=-A_{х2}omega ) во втором прыжке? Подставляя выражение для ( A_{х2}=-omega/A_{v1} ) в формулу ( A_{х2}=10A_{х1} ), а затем в формулу ( A_{v2}=-A_{х2}omega ), получим:

Итак, при увеличении амплитуды прыжка в 10 раз амплитуда скорости возрастает тоже в 10 раз, т.е. становится равной 40 м/с.
Определяем ускорение в простом гармоническом движении
Вернемся к примеру на рис. 12.5, где мячик совершает движение по окружности. Его координата перемещения по оси X определяется формулой:
где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( omega ) — это угловая скорость мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
Как мы уже выяснили в предыдущем разделе, его скорость перемещения по оси X определяется формулой:
Однако вращательное движение мячика также характеризуется центростремительным ускорением. Как выразить ее с помощью математической формулы?
Как известно (см. главу 10), угловая скорость ( omega ) центростремительное ускорение ( a ) связаны следующей формулой:

Поскольку в данном случае ( r=A ), то в итоге получим для центростремительного ускорения:

Теперь для определения ускорения периодических колебаний следа мячика по оси X на фотопленке нужно вычислить проекцию центростремительного ускорения на ось X:

(Здесь знак “минус” возникает, поскольку фотопленка движется вниз и ось Y направлена вниз, а потому угол ( gamma ) между вектором центростремительного ускорения и осью X равен ( 180^circ + theta ), a ( cos(gamma)=cos(180^circ + theta)=-cos(theta) ). — Примеч. ред.)
После подстановки выражений для ( theta=omega t ) и для ( a=Aomega^2 ) получим:

Как видите, в простом гармоническом движении амплитуда ускорения ( A_а=Aomega^2 ) связана с амплитудой перемещения ( A_х=A ) формулой:

Рассмотрим еще один простой пример. Пусть диафрагма (тоненькая пластинка) в трубке домашнего телефона совершает простое гармоническое движение с частотой ( theta=omega t ) величиной 1 кГц (т.е. 1000 Гц) и амплитудой перемещения ( A_х=A ) величиной 1,0·10-4 м. Чему равна амплитуда ускорения мембраны ( A_а )?
Поскольку ( omega=2pi!f ), то после подстановки этого выражения в предыдущую формулу ( A_а=-A_хomega^2 ) получим:

Подставляя численные значения, получим:

Как видите, мембрана обычного телефона испытывает очень большое ускорение, которое почти в 400 раз больше ускорения свободного падения ( g ) = 9,8 м/с2 под действием гравитационного притяжения Земли.
Определяем частоту колебаний груза на пружине
С математической точки зрения колебания груза на пружине и движение мячика по окружности (см. предыдущие разделы этой главы) принципиально не отличаются. Дело в том, что оба эти движения являются простыми гармоничными. Поэтому их основные характеристики (например, скорость, ускорение, частота и период колебаний) должны описываться аналогичными математическими формулами. Остановимся и подробно проследим за этой аналогией.
Как известно, согласно закону Гука (см. выше в этой главе), при растяжении пружины на величину ( x ) возникает упругая сила ( F ), которая равна:

где ( k ) — это коэффициент пропорциональности.
Согласно закону Ньютона (см. главу 5), сила и вызванное ею ускорение ( a ) связаны следующим соотношением:

откуда получаем:

Из предыдущего раздела нам уже известно, что в простом гармоническом движении перемещение и ускорение выражаются следующими формулами:
и
Подставляя эти выражения в предыдущую формулу, полученную на основе законов Гука и Ньютона, получим:

Сокращая некоторые переменные, получим:

Откуда легко можно выразить циклическую частоту:

Поскольку ( omega=2pi!f ) и ( omega=2pi/T ), то после подстановки предыдущего выражения в эти формулы получим:

и

Пусть пружина на рис. 12.1 обладает коэффициентом упругости ( k ), равным 1,0·10-2 Н/м, а к ней прикреплен груз массой 4 г. Чему будет равен период колебаний груза на пружине? Подставляя значения в предыдущую формулу для периода, получим:

А какова частота этих колебаний? Снова подставляя значения в предыдущую формулу для частоты, получим:

Используя формулы перемещения, скорости и ускорения для простого гармонического движения (см. ранее в этой главе):
можно вычислить координату, скорость и ускорение груза на пружине в произвольный момент времени. Как будут выглядеть эти формулы для задачи с грузиком на пружине?
Сначала вычислим циклическую частоту:
Если амплитуда ( A ) равна 10 см, то получим:
Вычисляем энергию простого гармонического движения
В простом гармоническом движении периодически происходит увеличение и уменьшение кинетической энергии, например груза на пружине. Ясно, что кинетическая энергия груза не пропадает, а преобразуется в энергию сжатой или растянутой пружины. Эта энергия называется упругой потенциальной энергией пружины. Сколько энергии запасено в сжатой или растянутой пружине?
Попробуем вычислить ее с помощью простых соображений. Как известно, работа ( A ) силы ( F ) при перемещении на расстояние ( s ) равна:

При сжатии или растяжении пружины сила ( F ) меняется линейно с расстоянием, поэтому работу этой силы по сжатию или растяжению пружины на расстояние ( s ) можно представить как произведение средней силы ( overline{F} ) на перемещение ( s ):

Средняя ( overline{F} ) сила определяется как:

где ( F_1=-kx_1 ) — это сила упругости в точке с координатой ( x_1 ), a ( F_2=-kx_2 ) — сила упругости в точке с координатой ( x_2 ). При этом перемещение ( s ) будет равно:

Подставляя выражения для ( s ) и ( overline{F} ) в формулу работы, получим:

Члены ( frac{kx^2_1}{2} ) и ( frac{kx^2_2}{2} ) выражают упругую потенциальную энергию пружины ( E_{у1} ) и ( E_{у2} ) в точках с координатами ( x_1 ) и ( x_2 ), соответственно. Таким образом, работа силы упругости равна изменению упругой потенциальной энергии пружины:
Рассмотрим простой пример. Насколько возрастет упругая потенциальная энергия пружины с коэффициентом упругости 1,0·10-2 Н/м при сжатии ее на 10 см? Подставляя значения в формулу

получим:

Учтите, что при изменении упругой потенциальной пружины с грузом (при отсутствии внешних сил) изменяется кинетическая энергия груза. Причем эти изменения происходят так, что неизменной остается полная энергия системы, состоящей из пружины и груза. Например, при достижении точки равновесия пружина полностью разжимается, и ее упругая потенциальная энергия становится равной нулю, а кинетическая энергия груза при этом становится максимальной. И наоборот, при максимальном сжатии или растяжении пружины ее упругая потенциальная энергия становится максимальной, а кинетическая энергия груза при этом становится равной нулю.
Качаемся вместе с маятником
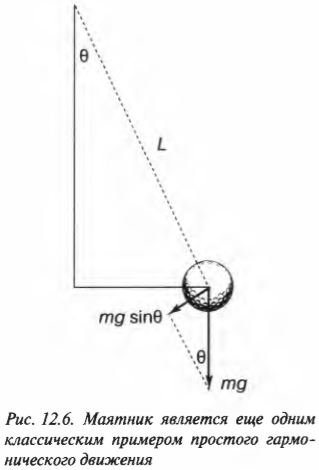
Еще одним типичным примером простого гармонического движения (кроме груза на пружине) является простой маятник, который показан на рис. 12.6.
Можно ли движение маятника описать математическими формулами простого гармонического движения, которые (выше в этой главе) использовались для описания движения груза на пружине? Да, и вот почему.
Дело в том, что на маятник, подвешенный на нити длиной ( L ) и отклоненный на угол ( theta ), действует сила гравитационного притяжения ( mathbf{F}=mmathbf{g} ). Перпендикулярная нити компонента силы создает сопротивление движению:

Момент этой компоненты силы

определяет угловое ускорение маятника ( alpha ):

Отсюда получаем формулу математического маятника:
(Математическим маятником называется идеализированная система, состоящая из невесомой и нерастяжимой нити, на которой подвешен груз с массой, сосредоточенной в одной точке. — Примеч. ред.)
При малых колебаниях, т.е. при малых значениях угла ( theta ); можно считать, что ( sin(theta)approxtheta ), и тогда прежняя формула приобретает следующий вид:

Эта формула связи ускорения и перемещения объекта очень похожа на прежние формулы простого гармонического движения груза на пружине и мячика по окружности (см. ранее в этой главе). Но прежде в эту формулу входило линейное перемещение, а теперь — угловое.
По аналогии с прежними формулами связи ускорения и перемещения объекта, совершающего простое гармоническое движение, коэффициент пропорциональности между ускорением и перемещением ( g/L ) равен квадрату циклической частоты ( omega^2 ). Отсюда получаем, что:

Далее, поскольку ( omega=2pi!f ) и ( omega=2pi/T ), то после подстановки предыдущего выражения в эти формулы получим:

и

Обратите внимание, что период качаний математического маятника не зависит от его массы!
Глава 12. Сжимаем пружины: простое гармоническое движение
3.4 (67.27%) 11 votes