|
Колебания, при которых изменения физических величин происходят по закону косинуса или синуса (гармоническому закону), наз. гармоническими колебаниями. Например, в случае механических гармонических колебаний:. В этих формулах ω – частота колебания, xm – амплитуда колебания, φ0 и φ0’ – начальные фазы колебания. Приведенные формулы отличаются определением начальной фазы и при φ0’ = φ0 +π/2 полностью совпадают. |
|
| Это простейший вид периодических колебаний. Конкретный вид функции (синус или косинус) зависит от способа выведения системы из положения равновесия. Если выведение происходит толчком (сообщается кинетическая энергия), то при t=0 смещение х=0, следовательно, удобнее пользоваться функцией sin, положив φ0’=0; при отклонении от положения равновесия (сообщается потенциальная энергия) при t=0 смещение х=хm, следовательно, удобнее пользоваться функцией cos и φ0=0. | |
|
Выражение, стоящее под знаком cos или sin, наз. фазой колебания: . Фаза колебания измеряется в радианах и определяет значение смещения (колеблющейся величины) в данный момент времени. |
|
| Амплитуда колебания зависит только от начального отклонения (начальной энергии, сообщенной колебательной системе). | |
| Скорость и ускорение при гармонических колебаниях. | |
|
Согласно определению скорости, скорость – это производная от координаты по времени |
|
| Таким образом, мы видим, что скорость при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания скорости опережают колебания смещения по фазе на π/2. | |
| Величина — максимальная скорость колебательного движения (амплитуда колебаний скорости). | |
|
Следовательно, для скорости при гармоническом колебании имеем: |

|
Согласно определению ускорения, ускорение – это производная от скорости по времени: . .Ускорение при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания ускорения опережают колебания скорости на π/2 и колебания смещения на π (говорят, что колебания происходят в противофазе). |
|
|
Величина — максимальное ускорение (амплитуда колебаний ускорения). Следовательно, для ускорения имеем: |
|
| Из анализа процесса колебательного движения, графиков и соответствующих математических выражений видно, что при прохождении колеблющимся телом положения равновесия (смещение равно нулю) ускорение равно нулю, а скорость тела максимальна (тело проходит положение равновесия по инерции), а при достижении амплитудного значения смещения – скорость равна нулю, а ускорение максимально по модулю (тело меняет направление своего движения). | |
|
Сравним выражения для смещения и ускорения при гармонических колебаниях: и |
|
|
Можно записать: — т.е. вторая производная смещения прямо пропорциональна (с противоположным знаком) смещению. Такое уравнение наз. уравнением гармонического колебания. Эта зависимость выполняется для любого гармонического колебания, независимо от его природы. Поскольку мы нигде не использовали параметров конкретной колебательной системы, то от них может зависеть только циклическая частота. |
|
|
Часто бывает удобно записывать уравнения для колебаний в виде: , где T – период колебания. Тогда, если время выражать в долях периода подсчеты будут упрощаться. Например, если надо найти смещение через 1/8 периода, получим: . Аналогично для скорости и ускорения. |
Источник: https://www.eduspb.com/node/1780
Амплитуда колебаний — определение, характеристика и формулы

Амплитуда колебаний – это максимальное значение отклонения от нулевой точки. В физике данный процесс анализируется в разных разделах.
Он изучается при механических, звуковых и электромагнитных колебаниях. В перечисленных случаях амплитуда измеряется по-разному и по своим законам.
Амплитуда колебаний
Амплитудой колебания называют максимальную отдаленную точку нахождения тела от положения равновесия. В физике она обозначается буквой А и измеряется в метрах.
За амплитудой можно наблюдать на простом примере пружинного маятника.

- В идеальном случае, когда игнорируется сопротивление воздушного пространства и трение пружинного устройства, устройство будет колебаться бесконечно. Описание движения выполняется с помощью функций cos и sin:
- x(t) = A * cos(ωt + φ0) или x(t) = A * sin(ωt + φ0),
- где
- величина А – это амплитуда свободных движений груза на пружине;
- (ωt + φ0) – это фаза свободных колебаний, где ω — это циклическая частота, а φ0 – это начальная фаза, когда t = 0.

В физике указанную формулу называют уравнением гармонических колебаний. Данное уравнение полностью раскрывает процесс, где маятник движется с определенной амплитудой, периодом и частотой.
Период колебаний
- Результаты лабораторных опытов показывают, что циклический период движения груза на пружине напрямую зависит от массы маятника и жесткости пружины, но не зависит от амплитуды движения.
- В физике период обозначают буквой Т и описывают формулами:

Исходя из формул, период колебаний – это механические движения, повторяющиеся через определенный промежуток времени. Простыми словами периодом называют одно полное движение груза.
Частота колебаний
Под частотой колебаний следует понимать количество повторений движения маятника или прохождения волны. В разных разделах физики частота обозначается буквами ν, f или F.
- Данная величина описывается выражением:
- v = n/t – количество колебаний за промежуток времени,
- где
- n – это единица колебаний;
- t – отрезок времени.
В Международной системе измерений частоту измеряют в Гц (Герцах). Она относится к точным измеряемым составляющим колебательного процесса.
Например, наукой установлена частота вращения Солнца вокруг центра Вселенной. Она равна -1035 Гц при одинаковой скорости.
Циклическая частота
В физике циклическая и круговая частота имеют одинаковое значение. Данная величина еще называется угловой частотой.

- Обозначают ее буквой омега. Она равна числу собственных колебательных движений тела за 2π секунд времени:
- ω = 2π/T = 2πν.
Данная величина нашла свое применение в радиотехнике и, исходя из математического расчета, имеет скалярную характеристику. Ее измерения проводят в радианах на секунду. С ее помощью значительно упрощаются расчеты процессов в радиотехнике.
- Например, резонансное значение угловой частоты колебательного контура рассчитывают по формуле:
- WLC = 1/LC.
- Тогда как обычная циклическая резонансная частота выражается:
- VLC = 1/2π*√ LC.
В электрике под угловой частотой следует понимать число полных трансформаций ЭДС или число оборотов радиуса – вектора. Здесь ее обозначают буквой f.
Для определения на графике составляющих колебательного механического процесса или, например, колебания температуры, нужно разобраться в терминах этого процесса.
К ним относят:
- расстояние испытываемого объекта от исходной точки – называют смещением и обозначают х;
- наибольшее отклонение – амплитуда смещения А;
- фаза колебания – определяет состояние колебательной системы в любой момент времени;
- начальная фаза колебательного процесса – когда t = 0, то φ = φ0.

Из графика видно, что значение синуса и косинуса может меняться от -1 до +1. Значит, смещение х может быть равно –А и +А. Движение от –А до +А называют полным колебанием.
Построенный график четко показывает период и частоту колебаний. Стоить отметить, что фаза не воздействует на форму кривой, а только влияет на ее положение в заданный промежуток времени.
Источник: https://nauka.club/fizika/amplituda-kolebaniy.html
Гармонические колебания
Определение 1
Техника и окружающий мир являются примерами того, что существуют такие процессы, которые повторяются через определенные промежутки времени, то есть периодически. Их называют колебательными.
Такие движения относят к явлениям с разной физической природой с подчинением общим закономерностям. Запись колебания тока в электрической цепи и математического маятника производится одним и тем же уравнением. Различная природа колебательных движений позволяет рассматривать их с единой точки зрения, исходя из общности закономерностей.
Определение 2
Механические колебания – это периодические или непериодические изменения физической величины, описывающей механическое движение (скорость, перемещение и так далее).
Когда в заданной среде атомы располагаются очень близко или молекулы испытывают силовое воздействие, наблюдается возбуждение механических колебаний. Это говорит о том, что процесс будет иметь конечную скорость, зависящую от свойств среды, которая распространяется от точки к точке. Так возникают механические волны. Явный пример – звуковые волны в воздухе.
Волновые процессы и колебания разной природы имеют много общего, а их распространение может быть описано аналогичными математическими уравнениями. Это подтверждает единство материального мира.
Гармонические колебания. Определение
В механике предусмотрено движение поступательно, вращательно и с наличием колебаний.
Определение 3
Механические колебания – это движения тел, которые повторяются точно или приблизительно за определенные одинаковые временные промежутки.
Функция x=f(t) объясняет закон движения тела с наличием колебаний. При графическом изображении дается представление о протекании колебательного процесса во времени. Рисунок 2.1.1 наглядно показывает принцип простых колебательных систем груза на пружине или математического маятника.

Рисунок 2.1.1. Механические колебательные системы.
Механические колебания подразделяют на свободные и вынужденные.
Определение 4
Действия внутренних сил системы после выведения из равновесия порождают свободные колебания. Примером могут служить колебания груза на пружине или маятника. Если их действие происходит под воздействием внешних сил, тогда их называют вынужденными.
Простейшим видом колебаний являются гармонические колебания, которые описываются уравнением x=xmcos (ωt+φ0), где x– смещение тела от положения равновесия, xm – амплитуда колебаний, ω– циклическая или круговая частота, t – время.
Величина, располагаемая под знаком косинуса, получила название фазы гармонического процесса: φ=ωt+φ0. Если t=0, φ=φ0, тогда φ0 рассматривается в качестве начальной фазы.
Период колебаний Т – это минимальный промежуток времени, через который происходят повторения движения тела. Величина, обратная периоду колебаний, называют частотой колебаний f=1T.
Частота гармонических колебаний показывает их количество, совершаемое за единицу времени, измеряемая в герцах (Г). Связь с циклической частотой ω и периодом T выражается с помощью формулы:
ω=2πf=2πT.
Рисунок 2.1.2 показывает гармонические колебания тел с разными положениями тел. Данный эксперимент наблюдается в специальных условиях при наличии периодических вспышек освещения, называемого стробоскопическим. Для изображения векторов скорости тела в разные моменты времени используют стрелки.

Рисунок 2.1.2. Стробоскопическое изображение гармонических колебаний. Начальная фаза φ0=0. Интервал времени между последовательными положениями тела τ = T12.
На графике 2.1.3. показаны изменения, происходящие во время гармонического процесса, при изменении амплитуды колебаний xm, или периода Т (частоты f), или начальной фазы φ0.

Рисунок 2.1.3. Во всех трех случаях для синих кривых φ0=0: a – красная кривая отличается от синей только большей амплитудой (x’m>xm); b – красная кривая отличается от синей только значением периода (T’=T2); с – красная кривая отличается от синей только значением начальной фазы φ0’=-π2 рад.
Гармонический закон
Если колебания совершаются вдоль прямой Ох, тогда направление вектора скорости аналогично. Определение скорости движения тела υ=υx определяют из выражения υ=∆x∆t; ∆t→0.
Отношение ∆x∆t при ∆t→0 математика трактует как вычисление производной функции x(t) за определенное время t. Обозначение принимает вид dx (t)dt, x'(t) или x˙.
Гармонический закон движения записывается в качестве x=xmcos (ωt+φ0). После вычисления производной формула приобретает вид:
υ=x˙(t)=-ωxmsin (ωt+φ0)=ωxmcos ωt+φ0+π2.
Слагаемое +π2 считают изменением начальной фазы. Достижение максимального значения скорости по модулю υ=ωxmпроизводится при прохождении тела через положение равновесия, то есть x=0. Аналогично определяют ускорение a=ax. Тогда a=∆υ∆t, ∆t→0. Отсюда следует, что a равняется производной функции υ(t) за время t или второй производной функции x(t). Подставив выражения, получим
a=υ˙(t)=x¨(t)=-ω2xmcos (ωt+φ0)=-ω2x(t).
Наличие отрицательного знака указывает на то, что ускорение a(t) имеет противоположный смещению x(t) знак. Исходя из второго закона Ньютона, сила, которая заставляет совершать колебательные движения, направляется в сторону положения равновесия x=0.
На рисунке 2.1.4 изображены графики, где имеются зависимости скорости, ускорения, совершающие гармонические колебания.

Рисунок 2.1.4. Графики координаты x (t), скорости υ (t) и ускорения a (t) тела, совершающего гармонические колебания.

Рисунок 2.1.5. Модель гармонических колебаний.
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Источник: https://Zaochnik.com/spravochnik/fizika/mehanicheskie-kolebanija/garmonicheskie-kolebanija/
Механические колебания
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
- Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
- (1)
- Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой. Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
- (2)
- (3)
- Измеряется циклическая частота в рад/с (радиан в секунду).
- В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
- .
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
Рис. 1. График гармонических колебаний
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
.
График гармонических колебаний в этом случае представлен на рис. 2.
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
.
График колебаний представлен на рис. 3.
Уравнение гармонических колебаний
- Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
- . (4)
- Теперь дифференцируем полученное равенство (4):
- . (5)
- Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
- . (6)
- Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
- . (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением.
Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными ;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
Пружинный маятник
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
Рис. 4. Пружинный маятник
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
. (8)
Если (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
- Тогда соотношение (8) принимает вид:
- или
- .
- Мы получили уравнение гармонических колебаний вида (6), в котором
- .
- Циклическая частота колебаний пружинного маятника, таким образом, равна:
- . (9)
- Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
- . (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
Математический маятник
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
Рис. 5. Математический маятник
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
- Запишем для маятника второй закон Ньютона:
- ,
- и спроектируем его на ось :
- .
Если маятник занимает положение как на рисунке (т. е. ), то:
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
- .
- Итак, при любом положении маятника имеем:
- . (11)
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11):
- ,
- или
- .
- Это — уравнение гармонических колебаний вида (6), в котором
- .
- Следовательно, циклическая частота колебаний математического маятника равна:
- . (12)
- Отсюда период колебаний математического маятника:
- . (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
Рис. 6. Затухающие колебания
- Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
- Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
- .
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний.
Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими.
Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
Мы видим, что вблизи частоты наступает резонанс — явление возрастания амплитуды вынужденных колебаний.
Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе.
При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .
Источник: https://ege-study.ru/ru/ege/materialy/fizika/mexanicheskie-kolebaniya/
§12. Гармоническое колебательное движение и волны
Решебник Волькенштейн В.С. (1985) — Задача 12. 16
Уравнение колебаний материальной точки массой m = 10 г имеет вид x = 5sin(π/5·t+π/4) см. Найти максимальную силу Fmax, действующую на точку, и полную энергию W колеблющейся точки.
Решебник Волькенштейн В.С. (1985) — Задача 12. 15
Уравнение колебания материальной точки массой m = 16 г имеет вид х = 0,1sin(π/8 · t+π/4). Построить график зависимости от времени t (в пределах одного периода) силы F, действующей на точку. Найти максимальную силу Fmax.
Решебник Волькенштейн В.С. (1985) — Задача 12. 14
Начальная фаза гармонического колебания φ = 0 . При смещении точки от положения равновесия х1 = 2,4 см скорость точки v1 = 3 см/с, а при смещении x2 = 2,8 см ее скорость v2 = 2 см/с. Найти амплитуду А и период Т этого колебания.
Решебник Волькенштейн В.С. (1985) — Задача 12. 13
Написать уравнение гармонического колебательного движения, если максимальное ускорение точки amах = 49,3 см/с2, период колебаний T = 2 с и смещение точки от положения равновесия в начальный момент времени х0 = 25 мм.
Решебник Волькенштейн В.С. (1985) — Задача 12. 12
Точка совершает гармоническое колебание. Период колебаний Т = 2 с, амплитуда А = 50 мм, начальная фаза φ = 0.Найти скорость v точки в момент времени, когда смешение точки от положения равновесия х = 25 мм.
Решебник Волькенштейн В.С. (1985) — Задача 12. 11
Уравнение движения точки дано в виде x = sinπ/6·t. Найти моменты времени t, в которые достигаются максимальная скорость и максимальное ускорение.
Решебник Волькенштейн В.С. (1985) — Задача 12. 10
Уравнение движения точки дано в виде х = 2sin(π/2·t+π/4).Найти период колебаний T, максимальную скорость vmах и максимальное ускорение amаx точки.
Решебник Волькенштейн В.С. (1985) — Задача 12. 9
Амплитуда гармонического колебания A = 5 см, период T = 4 с. Найти максимальную скорость vmax колеблющейся точки и ее максимальное ускорение amах.
Решебник Волькенштейн В.С. (1985) — Задача 12. 8
Через какое время от начала движения точка, совершающая колебательное движение по уравнению х = 7sinπ/2·t, проходит путь от положения равновесия до максимального смещения?
Решебник Волькенштейн В.С. (1985) — Задача 12. 7
Начальная фаза гармонического колебания φ = 0. Через какую долю периода скорость точки будет равна половине ее максимальной скорости?
Источник: https://zzapomni.com/paragrafy/ss12-garmonicheskoe-kolebatelnoe-dvizhenie-i-volny?page=5
смещение положения равновесия точки
смещение положения равновесия точки
Задача 40713
Написать уравнение синусоидального гармонического колебания, если амплитуда скорости 63 см/с, период колебаний 1 с, смещение точки от положения равновесия в начальный момент времени равно нулю. Найти амплитуду ускорения, частоту колебаний.
Задача 40738
Написать уравнение гармонического колебания, совершаемого по закону косинуса, если амплитуда ускорения 50 см/с2, частота колебаний 50 Гц, смещение точки от положения равновесия в начальный момент времени 25 мм. Найти амплитуду скорости.
Задача 40739
Написать уравнение гармонического колебания, совершаемого по закону косинуса, если амплитуда ускорения 50 м/с2, частота колебаний 50 Гц, смещение точки от положения равновесия в начальный момент времени 0,25 мм. Найти амплитуду скорости.
Задача 26216
Написать уравнение гармонических колебаний с амплитудой 50мм, периодом 4с и начальной фазой П/4. Найти смещение точки от положения равновесия при t = 0 и t = 1,5 с.
Задача 26560
Уравнение незатухающих колебаний дано в виде: У = 4 ·10–2cos6πt, м. Найти смещение от положения равновесия точки, находящейся на расстоянии 75 см от источника колебаний через 0,01 с после начала колебаний. Скорость распространения колебаний 340 м/с.
Задача 11103
Напишите уравнение гармонического колебания, если амплитуда скорости vm = 63 см/с, период колебаний Т = 1 с, смещение точки от положения равновесия в начальный момент времени равно нулю. Найдите амплитуду ускорения и частоту колебаний. Постройте график зависимости смещения от времени.
Задача 12666
На каком ближайшем расстоянии от источника колебаний с периодом 45 мс через время, равное половине периода после включения источника смещение точки от положения равновесия равно половине амплитуды? Скорость распространения колебаний равна 158 м/с. Считать, что в момент включения источника все точки находятся в положении равновесия.
Задача 14576
Уравнение незатухающих колебаний х = 4sin(600πt) см. Найти смещение x от положения равновесия точки, находящейся на расстоянии l = 75 см от источника колебаний, для момента времени t = 0,01с после начала колебаний. Скорость распространения колебаний v = 300 м/с.
Задача 14932
Плоская монохроматическая волна распространяется вдоль оси Y. Амплитуда волны А = 0,05 м. Считая, что в начальный момент времени смещение точки Р, находящейся в источнике, максимально, определить смещение от положения равновесия точки М, находящейся на расстоянии у = λ/2 от источника колебаний в момент времени t = T/6.
Задача 15330
Смещение от положения равновесия точки, находящейся на расстоянии 4 см от источника колебаний, в момент времени Т/6 равно половине амплитуды. Найти длину бегущей волны.
Задача 17372
Начальная фаза гармонического колебания ψ = 0. При смещении точки от положения равновесия х1 = 2,4 см скорость точки v1 = 3 см/с, а при смещении х2 = 2,8 см ее скорость v2 = 2 см/с. Найти амплитуду А и период Т этого колебания.
Задача 19324
На каком расстоянии от источника колебаний, совершаемых по закону синуса, в момент времени t = T/2 смещение точки от положения равновесия равно половине амплитуды? Скорость распространения колебаний 340 м/с. Период колебаний 10–3 с.
Задача 19326
Источник плоских волн совершает колебания по закону x = A cos ωt. Через четверть периода после начала колебаний смещение от положения равновесия точки, находящейся на расстоянии 4 см от источника, равно половине амплитуды. Найти длину бегущей волны.
Задача 19327
Источник плоских волн совершает колебания по закону x = A cos ωt. Какова амплитуда колебаний, если смещение от положения равновесия точки, отстоящей от источника на расстоянии λ/12 для момента времени T/4, равно 0,025 м?
Задача 20380
Определить начальную фазу колебаний, которые происходят по закону косинуса, если максимальная скорость равна 16 см/с, период колебаний 1,4 с, а смещение точки от положения равновесия в начальный момент времени составляет 2,84 см.
Источник: http://reshenie-zadach.com.ua/fizika/1/smeshhenie_polozheniya_ravnovesiya_tochki.php
Амплитуда результирующего колебания равна сумме амплитуд слагаемых колебаний
- Синфазные колебания усиливают друг друга!
- Интересно, что энергия суммарного колебательного движения, пропорциональная квадрату амплитуды, не равна сумме энергий каждого колебания по отдельности, ибо
-
2 Пусть j01 — j02 = (2k -1)p, где k = 0, 1, 2,… В этом случае говорят, что колебания происходят в противофазе. Векторная диаграмма выглядит следующим образом
- Если А1 > А2, то результирующее колебание происходит синфазно с первым колебанием. Но амплитуда результирующего колебания уменьшилась:
В этом случае говорят, что колебания ослабляют друг друга. Очевидно, что при А1 = А2 результирующая амплитуда вообще будет равной нулю. Это означает, что тело не будет двигаться вообще. Колебания погасили друг друга.
3 Во всех остальных случаях, когда колебания не будут синфазными или противофазными, мы будем видеть колебания с амплитудой, большей , но меньшей, чем .
Полученные результаты имеют бесчисленное множество применений. Забегая вперед, скажем, что если, например, в определенном месте пространства происходят звуковые колебания под действием двух источников, то результирующая громкость звука может оказаться меньше, чем громкость, создаваемая каждым источником в отдельности.
Если звуки, создаваемые каждым источником в отдельности, имеют одинаковую интенсивность, то при подходящих условиях эти звуки гасят друг друга, и можно сказать, что «звук + звук = молчание».
Возможны также условия, когда два пучка света, падающие на экран, дают не большую, а меньшую освещенность, чем каждый пучок в отдельности; возможен даже случай, когда «свет + свет = темнота». Но об этом позже…
§ 2 Сложение взаимно перпендикулярных колебаний
Рассмотрим сначала случай, когда материальная точка одновременно участвует в двух взаимно перпендикулярных колебаниях, имеющих одну частоту. Проблема заключается в определении траектории точки, которую мы будем в этом случае наблюдать.
Пусть одно колебание происходит по оси ОХ, другое – по OY .
Понятно, что точка описывает плоскую траекторию и уравнения и можно рассматривать как уравнение этой траектории в параметрической форме. Нетрудно видеть, что это — уравнение эллипса, вписанного в прямоугольник со сторонами . Ориентация главных осей эллипса зависит от сдвига фаз . На рисунке показаны частные случаи таких эллипсов:
- Нетрудно показать, то при сдвиге фаз эллипс вырождается в прямую на рисунке б:
- Мы будем видеть колебательное движение точки вдоль прямой, проходящей через начало координат, с амплитудой .
- При получаем траекторию на рисунке в:
- Траекторией будет эллипс, у которого главные оси совпадают с осями координат так, как показано на рисунке г , если
- Покажем это
- Разделив обе части каждого уравнения на А и В соответственно, получаем
- Возведем каждое уравнение в квадрат и сложим почленно:
Сдвиг по фазе определит в этом случае направление движения точки. Оно будет происходить по часовой стрелке, если , и против часовой стрелки, если .
- Если амплитуды колебаний по осям ОХ и OY будут равны А = В, то эллипс преобразуется в окружность радиуса А = В:
- Важно заметить, что любое равномерное движение по окружности радиуса А с угловой скоростью может быть разложено на два взаимно перпендикулярных гармонических колебания с частотой .
- Движение по эллипсу тоже может быть разложено на два взаимно перпендикулярных колебания.
Более сложной получается траектория точки, совершающей колебания во взаимно перпендикулярных направлениях, если частоты колебаний не равны. В частности, если частоты относятся как целые числа, траектория оказывается замкнутой линией. Такая траектория называются фигурой Лиссажу. Ниже приведены примеры фигур Лиссажу для некоторых значений и .
- §3 Сложение колебаний с близкими частотами, происходящими вдоль одной прямой
- Рассмотрим случай сложения двух колебаний одного направления и одинаковой амплитуды, частоты которых и очень мало отличаются друг от друга (
Источник: https://megaobuchalka.ru/5/47822.html
Скорость колеблющейся точки –
это первая производная от смещения
точки по времени (за основу возьмем
второе из пары уравнений (1.1)):
![]() .
.
(1.4)
Здесь max
= Aω0—максимальнаяскорость,илиамплитуда скорости.
Ускорение – это втоpая пpоизводная
от смещения точки по времени:
![]() (1.5)
(1.5)
где amax = Aω02
—максимальное ускорение,илиамплитуда ускорения.
Из формул (1.1), (1.4) и (1.5) видно, что смещение,
скорость и ускорение не совпадают
по фазе (pис. 1.2). В моменты вpемени,
когда смещение максимально, скоpость
pавна нулю, а ускоpение пpинимает
максимальное отpицательное значение.
Смещение и ускоpение находятся впpотивофазе— так говоpят, когда
pазность фаз pавна.
Ускоpение всегда напpавлено в стоpону,
пpотивоположную смещению.
Полная энергия колебаний равна
сумме кинетической и потенциальной
энеpгий колеблющейся точки:
W = Wк
+ Wп = m
2 / 2 + kx2 /
2.
Подставим в это выражение формулы (1.4)
и (1.1) с учетом k = mω02(как будет показано ниже), получим
W = k A2
/ 2 =m A2 ω02
/2. (1.6)
Из сопоставления графиков функций
х(t), Wк(t)
и Wп(t)
(рис.1.3) видно, что частота колебаний
энергии в два раза больше частоты
колебаний смещения.


Рис. 1.2
Рис.
1.3
Cреднее значение
потенциальной и кинетической энергии
за периодТравно половине полной
энергии (рис. 1.3):
![]()
П р и м е р 1. Материальная точка
массой 5 г совершает колебания согласно
уравнению
![]() гдеx – смещение, см.
гдеx – смещение, см.
Определить максимальную силу и полную
энергию.
Р е ш е н и е. Максимальная сила
выражается формулой![]() где
где![]() (см. формулу (1.5)). ТогдаFmax=mAω02.
(см. формулу (1.5)). ТогдаFmax=mAω02.
Из уравнения колебания следует, что![]() Подставим числовые значения:Fmax=5∙10-3
Подставим числовые значения:Fmax=5∙10-3
0,1∙4 = 2∙10-3Н = 2мН.
Полная энергия
![]() В итогеE= 0,5∙5∙10-3∙4∙10-2= 10-4Дж.
В итогеE= 0,5∙5∙10-3∙4∙10-2= 10-4Дж.
1.3. Диффеpенциальное
уpавнение
Свободных незатухающих колебаний. Маятники
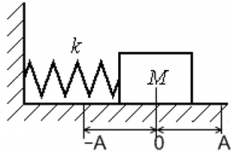
Система, состоящая из тела массой m,
подвешенного к пружине, второй конец
которой закреплён, называютпружинным
маятником(рис. 1.4). Такая система
служит модельюлинейного осциллятора.
Если растянуть (сжать) пружину на величину
х, то возникнет упругая сила, которая
стремится вернуть тело в положение
равновесия. При небольших деформациях
справедлив закон Гука:F = — kx, гдеk— коэффициент жесткости пpужины. Запишем
второй закон Ньютона:
 ma = — kx. (1.7)
ma = — kx. (1.7)
Знак «минус» означает, что сила
упругости направлена в сторону,
противоположную смещению x.Подставим в это уpавнение ускоpениеaколеблющейся точки из уpавнения (1.5),
получим
— m ω02 x = —
k x,
откудаk = m ω02,![]() Пеpиод колебаний
Пеpиод колебаний
![]() (1.8)
(1.8)
Таким образом, период колебаний не
зависит от амплитуды.
П р и м е р 2. Под действием силы
тяжести груза пружина растянулась на
5 см. После вывода ее из состояния покоя
груз совершает гармонические колебания.
Определить период этих колебаний.
Р е ш е н и е. Период колебаний
пружинного маятника находим по формуле
(1.8). Коэффициент жесткости пружины
рассчитаем по закону Гука, исходя из
того, что пружина растягивается под
действием силы тяжести:mg
= — kx, откуда модульk = mg/x.
Подставимkв формулу
(1.8):
![]()
Выполним вычисления и вывод единицы
измерения:
![]()
![]()
Из формулы (1.7) следует дифференциальное
уравнение гармонических колебаний:
![]() или
или![]()
Заменив отношение k/m = ω02
, получимдифференциальное уравнениесобственных незатухающих колебаний в
виде
![]()
(1.9)
Его решениями являются выражения (1.1).
П р и м е р 3. Дифференциальное
уравнение незатухающих гармонических
колебаний имеет вид![]() .
.
Найти частоту и период этих колебаний.
Р е ш е н и е. Запишем уравнение в
виде:![]() .
.
О тсюда
тсюда
следует, что![]() а
а![]() Период колебаний определяется по
Период колебаний определяется по
формуле:![]() Следовательно,Т= 2∙3,14/2 = 3,14 с.
Следовательно,Т= 2∙3,14/2 = 3,14 с.
Физическим маятникомназывают
твёрдое тело, которое совершает колебания
под действием силы тяжести вокруг
неподвижной горизонтальной оси (рис.
1.5), проходящей через точкуО, не
совпадающую с центром массС тела.
Момент силы тяжести mgотносительно
оси вращенияО
![]() ,
,
где
![]() —
—
длина физическогомаятника(pасстояние от точки подвеса до центpа
масс маятника
![]() = OC).
= OC).
По основному закону динамики вpащательного
движения I
= M,
![]() ЗдесьI– момент
ЗдесьI– момент
инерции маятника относительно оси,
проходящей через точку подвесаО,
— угловое ускорение.
Для малых отклонений sin = ,
тогда
![]() (1.10)
(1.10)
Из сравнения уравнений (1.9) и (1.10) следует,
что
![]() и пеpиод колебаний
и пеpиод колебаний
![]() (1.11)
(1.11)
М атематический
атематический
маятникпредставляет
собой материальную точку массойm,
подвешенную на абсолютно упругой
нерастяжимой нити и совершающую
колебания под действием силы тяжести
(рис. 1.6).
В формулу (1.11) подставим момент инерции
материальной точки относительно оси,
проходящей через точку подвеса,
![]() ,
,
получим
![]()
Рис. 1.6
. (1.12)
Из выражений (1.11) и (1.12) следует, что
физический маятник имеет такой же период
колебаний, как и математический с длиной
![]() .
.
Эту величину называют приведённой длинойфизического маятника.
Отметим, чтоI— момент
инеpцииотносительнооси, пpоходящей
чеpез точку подвесаO. По теоpеме
Штейнеpа
![]()
где IC
— момент инеpцииотносительно
оси,пpоходящей чеpез центp массмаятника. Пpедставим пpиведенную длину
маятника в виде
![]()
откуда видно, что пpиведенная длина
физического маятника больше его длины
![]()
Если от точки подвеса О отложить![]() (см. рис. 1.5), то найдём точкуО1,
(см. рис. 1.5), то найдём точкуО1,
которая называетсяцентром качания.
Точка подвеса и центр качания являются
сопряженными. Это значит, что маятник,
подвешенный за центр качанияО1,
не изменит периода колебаний, а точкаOсделается новым центром качания.
П р и м е р 4. Однородный стержень
длинойb совершает
колебания в вертикальной плоскости
вокруг оси, проходящей через один из
его концов (рис.1.7). Определить период
колебаний.
Р е ш е н и е. Воспользуемся формулой
е ш е н и е. Воспользуемся формулой
для определения периода колебаний
физического маятника (1.11), гдеℓ=ОС– расстояние от оси вращения до
центра масс. Это расстояниеℓ=b/2
(рис. 1.7). Момент инерции стержня
относительно его концаI=1/3mb2. Следовательно,![]()
Сила, возвpащающая маятник в положение
pавновесия (рис. 1.6),
![]() т. е. пpопоpциональна смещениюx, но
т. е. пpопоpциональна смещениюx, но
эта сила не упpугая по своей пpиpоде,
поэтому она называетсяквазиупругой.
Таким образом, механические гармонические
колебания возникают в системах под
действием сил, пропорциональных смещению.
Колебания ― это процесс, при котором состояние системы изменяется, повторяясь во времени, и смещаясь то в одну, то в другую сторону относительно состояния равновесия.
Период ― это время, через которое повторяются показатели системы, т. е. система совершает одно полное колебание. Период изменяется в секундах.
Частота ― величина обратная периоду: число полных колебаний за единицу времени. Частота измеряется в герцах [Гц] = [c-1]. Частота равна v = $frac{1}{T}$ , где
v ― частота [Гц];
T ― период [c].
Если известно, что тело совершает N колебаний за время t, то частоту его колебаний можно определить как v = $frac{N}{t}$ , где
ν ― частота [Гц];
N ― количество колебаний;
t - время [с].
Для описания колебательных систем, совершающих круговые процессы, удобно использовать круговую (циклическую) частоту. Циклическая частота показывает количество полных колебаний, которые происходят за 2π секунд и равна ω = 2πvили ω = $frac{2pi}{T}$ , где
ω ― циклическая частота [рад/с];
ν ― частота [Гц];
T ― период [c].
Гармонические колебания ― колебания, в которых физические величины изменяются по закону синуса или косинуса. Кинематическое уравнение гармонических колебаний имеет вид:
x(t) = Asin(ωt + φ0) или x(t) = Acos(ωt + φ0), где
x ― смещение [м];
t ― время, [с];
A ― амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
φ0 ― начальная фаза колебаний, [рад];
(ωt + φ0) ― полная фаза колебаний [рад].
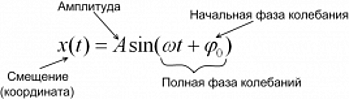
Смещение (x) ― это отклонение тела от положения равновесия. Смещение также является координатой тела, если отсчитывать ее от положения равновесия.
Амплитуда колебаний (A) ― максимальное отклонение колеблющейся величины от положения равновесия, т. е. максимальное смещение равно амплитуде колебаний xmax = A.
Начальная фаза колебаний (φ0) определяет смещение в начальный момент времени, выраженное в радианах.
Фаза колебаний (φ) или полная фаза колебаний, определяет смещение в данный момент времени, выраженное в радианах. Фаза колебаний равна φ = ωt + φ0, где
φ ― полная фаза колебаний [рад];
φ0 ― начальная фаза колебаний, [рад];
ω ― циклическая частота [рад/с];
t ― время, [с].
Пример анализа гармонических колебаний точки
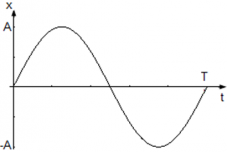
Рассмотрим гармонические колебания, в которых уравнение движения точки имеет вид x(t) = Asin(ωt), где
x ― смещение [м];
t ― время, [с];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с].
Из уравнения x(t) = Asin(ωt) следует, что начального смещения нет (φ0 = 0) и колебания начинаются из положения равновесия. Смещение x достигает максимального значения xmax и равно амплитуде xmax = A, в тот момент, когда модуль синуса равен единице |sin(ωt)| = 1. Когда x = A фаза колебаний равна φ = $frac{pi}{2} +2pi n$ когда x = –A фаза колебаний принимает значения φ = $frac{3pi}{2} +2pi n$ , где n = 0, 1 , 2, … N.
График колебания координаты точки имеет вид:
Определим уравнение и график колебания скорости. Скорость ― это производная координаты по времени: v = xt‘, где
v ― скорость движения точки [м/с];
x ― координата точки [м];
t ― время, [с].
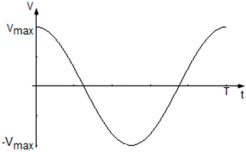
Так как закон изменения координаты нам известен x(t) = Asin(ωt), скорость движения колеблющейся точки: v = xt‘ = |Asin(ωt)|’t = Acos(ωt).
Уравнение скорости точки равно v(t) = Acos(ωt), где
v ― скорость движения точки [м/с];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
t ― время, [с].
Сравнив уравнение v(t) = Aωcos(ωt) с кинематическим уравнением гармонических колебаний, легко заметить, что Aω ― амплитуда изменения скорости, а ωt ― фаза колебаний скорости. Таким образом, максимальное значение скорости равно vmax = Aω, и оно достигается при | cos(ωt) | = 1, т. е. тогда, когда фаза колебаний скорости равна φ = πn, где n = 0, 1, 2, … N.
График колебания скорости точки имеет вид:
Аналогично определяются уравнение и график колебания ускорения точки, которая движется по гармоническому закону.
Ускорение ― это производная скорости по времени: a = vt‘, где
a ― ускорение движения точки [м/с2];
v ― скорость движения точки [м/с];
t ― время, [с].
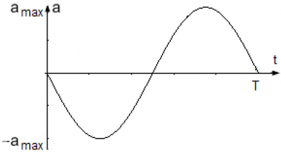
Так как закон изменения скорости был определен выше v(t) = Aωcos(ωt), определим ускорения движения колеблющейся точки: a = vt‘ = [Aωcos(ωt)]t‘ = –Aω2sin(ωt).
Уравнение ускорения точки равно a(t) = –Aω2sin(ωt), где
a ― ускорение движения точки [м/с2];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
t ― время, [с].
Модуль ускорения точки максимален, когда |sin(ωt)| = 1 ― тогда же, когда достигает максимума смещение точки. Максимальное ускорение, т. е. амплитуда ускорения точки равна amax = Aω2.
График колебания ускорения точки имеет вид:
Во время гармонических колебаний, формы энергии колебательной системы все время находятся в процессе взаимной трансформации. В механической колебательной системе преобразуется механическая энергия: потенциальная энергия ― в кинетическую, а затем кинетическая энергия ― вновь в потенциальную. Полная механическая энергия колеблющейся системы постоянна, и в любой момент времени справедлив закон сохранения энергии E = EП + EK, где
E ― полная механическая энергия системы, E = const, [Дж];
EП ― потенциальная энергия системы, изменяющаяся во времени, [Дж];
EK ― кинетическая энергия системы, изменяющаяся во времени, [Дж].
Рассмотрим изменение потенциальной энергии пружинного маятника, который колеблется по гармоническому уравнению x(t) = Asin(ωt).
Потенциальная энергия деформированной пружины равна EП = $frac{kx^2}{2}$ , где
EП ― потенциальная энергия деформированной пружины, [Дж];
k ― коэффициент упругости пружины [Н/м];
x ― деформация пружины (величина ее удлинения или сжатия) [м].
У пружинного маятника деформация пружины ― переменная величина, которая зависит от времени. Кинематическое уравнение движения точки, принадлежащей этому маятнику ― x(t) = Asin(ωt). Следовательно, потенциальную энергию пружинного маятника можно записать как EП = $frac{k(x(t))^2}{2}$ = $frac{k(Asin(omega t))^2}{2}$ = $frac{k}{2} cdot A^2 sin^2 (omega t)$ .
Уравнение потенциальной энергии пружинного маятника EП = $frac{k}{2} cdot A^2 sin^2 (omega t)$ , где
EП ― потенциальная энергия пружинного маятника, [Дж];
k ― коэффициент упругости пружины [Н/м];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
t ― время, [с].
Амплитуда потенциальной энергии пружинного маятника равна EПmax = $frac{k}{2}A^2$ , где
EПmax ― максимальная потенциальная энергия пружинного маятника, [Дж];
k ― коэффициент упругости пружины [Н/м];
A — амплитуда колебаний [м].
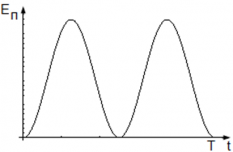
Потенциальная энергия пружинного маятника равна нулю, когда sin(ωt) = 0 ― когда маятник проходит положение равновесия, и максимальна, когда sin(ωt) = 1 ― когда маятник находится в крайних положениях, т. е. когда его смещение равно амплитуде.
График колебаний потенциальной энергии пружинного маятника:
Рассмотрим изменение кинетической энергии маятника. Кинетическая энергия тела равна Eк = $frac{mv^2}{2}$ , где
Eк ― кинетическая энергия тела, [Дж];
m ― масса тела, [кг];
v ― скорость движения тела, [м/с].
У тела, которое совершает колебательные движения, скорость ― переменная величина.
Выше было показано, что если уравнение движения точки имеет вид x(t) = Asin(ωt), то уравнение скорости точки v(t) = Aωcos(ωt). Таким образом, кинетическая энергия маятника равна Eк = $frac{m(v(t))^2}{2}$ = $frac{m}{2} cdot (Aomegacos(omega t))^2$ = $frac{m}{2} cdot A^2 omega^2 cos^2 (omega t)$ .
Уравнение кинетической энергии маятника Eк = $frac{m}{2} cdot A^2 omega^2 cos^2 (omega t)$ , где
Eк ― кинетическая энергия маятника, [Дж];
m ― масса тела, [кг];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
t ― время, [с].
Амплитуда кинетической энергии маятника равна EКmax = $frac{m}{2} cdot A^2 omega^2$ , где
EКmax ― максимальная кинетическая энергия маятника, [Дж];
m ― масса тела, [кг];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с].
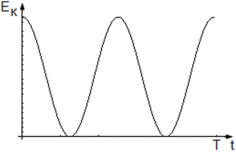
Максимальная кинетическая энергия маятника достигается тогда, когда cos2(ωt) = 1 ― маятник проходит положение равновесия, и она равна нулю, когда маятник находится в крайнем положении.
График колебаний кинетической энергии маятника:
Математический маятник ― это колебательная система, состоящая из материальной точки, подвешенной на нерастяжимой нити или стержне.
Период колебаний математического маятника равен T = $2pi sqrt{frac{l}{g}}$ , где
T ― период колебаний [с];
l ― длина нити математического маятника [м];
g ― ускорение свободного падения [м/с2].
Период колебаний пружинного маятника равен T = $2pi sqrt{frac{m}{k}}$ , где
T ― период колебаний [с];
m ― масса груза [кг];
k ― жесткость пружины [Н/м].
Существует особый тип колебаний ― вынужденные колебания. Вынужденные колебания происходят только под постоянным периодическим внешним воздействием и их характеристики зависят от характеристик этого воздействия.
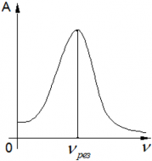
Если частота внешнего воздействия, которое вызывает вынужденные колебания, совпадает с собственной внутренней частотой колебательной системы ― возникает явление резонанса. При резонансе резко возрастает амплитуда колебаний системы. Частота, при которой возникает явление резонанса, называется резонансной частотой.
На рисунке показан график резонансной кривой ― увеличение амплитуды при совпадении частоты внешнего воздействия с внутренней частотой системы.
Содержание книги
Предыдующая страница
§17. Механические колебания
17.2 Кинематика колебательного движения.
В данном разделе мы рассмотрим простейшую кинематическую модель колебательного движения материальной точки, движущейся вдоль прямой. Условия, при которых эта модель адекватно описывает реальные колебания, могут быть получены только на основании физических законов, в частности, законов динамики.
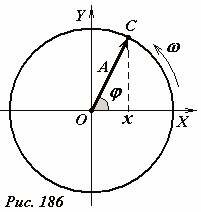
Для построения этой модели обратим внимание, что равномерное движение точки по окружности является периодическим процессом. Действительно, пусть материальная точка C движется с постоянной угловой скоростью ω по окружности радиуса A. При этом угловая координата точки будет изменяться по линейному закону
(~varphi = varphi_0 + omega t) , (1)
где φ0 — начальная координата точки. Не смотря на то, что угол поворота монотонно возрастает, через равные промежутки времени, равные периоду вращения (~T = frac{2 pi}{omega}) точка возвращается в исходное положение, в котором ее кинематические характеристики (скорость, ускорение) принимают исходные значения. Если радиус-вектор точки, векторы ее скорости и ускорения изменяются по периодическому закону, то и их проекции также изменяются по периодическим законам. Иными словами, движение проекции точки на любую из осей координат является колебательным движением вдоль прямой.
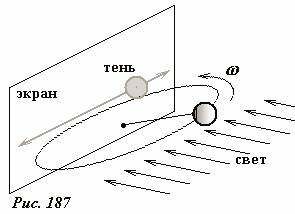
Отметим, что такое колебательное движение проекции можно наблюдать в реальном эксперименте. Для этого необходимо поместить вращающийся по окружности шарик перед плоским экраном и осветить его световым потоком, параллельным плоскости вращения (Рис. 187). В этом случае тень от шарика будет совершать колебания вдоль одной прямой.
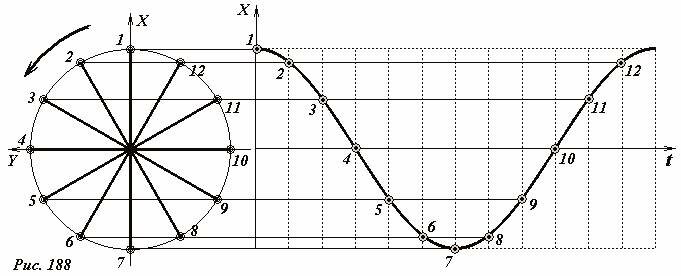
Даже будучи не знакомы с тригонометрическими функциями, достаточно легко построить график закона движения тени шарика. Для этого необходимо изобразить окружность, отметить на ней равноотстоящие точки, а затем нанести на график временной зависимости их координаты через равноотстоящие интервалы времени. (Рис. 188).
Не будем делать вид, что нам совсем незнакома ни тригонометрия, ни кинематические законы равномерного движения по окружности, и на их основании получим строгие выражения для кинематических характеристик рассматриваемой модели колебательного движения.
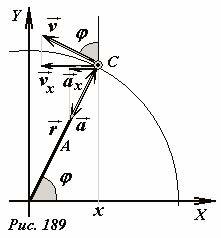
Еще раз изобразим часть окружности радиуса A, по которой движется материальная точка C (Рис. 189). Положение точки задается радиус-вектором (~vec r), направленным под переменным углом φ к оси Ox. Проекция этого вектора на ось Ox равна
(~x = A cos varphi) . (2)
Учитывая, что угол поворота изменяется в соответствии с формулой (1), получим закон изменения координаты точки от времени
(~x(t) = A cos (varphi_0 + omega t)) . (3)
Движение, при котором координата точки изменяется по закону косинуса (или синуса) называется гармоническим [1] колебанием. Таким образом, при равномерном движении точки по окружности ее проекция совершает гармонические колебания.
Как следует из вида функции (3), гармоническое колебание точки определяется тремя параметрами, каждый из которых имеет наглядный смысл[2]. Параметр A называется амплитудой колебаний, он равен максимальному отклонению точки от центрального положения. Эта величина имеет ту же размерность, что и координата x, то есть размерность длины. Изменяющаяся величина (varphi = varphi_0 + omega t) называется фазой колебания, а величина φ0 — начальной фазой.
Параметр ω называется круговой частотой колебаний. Так как период косинуса равен 2π, то при изменении аргумента косинуса на эту величину значения функции принимает прежнее значение. Это обстоятельство позволяет выразить круговую частоту через время одного колебания T (которое также называется периодом колебаний). Для этого следует учесть, что при изменении времени на период Δt = T фаза колебания изменяется на (Delta varphi = omega Delta t = 2 pi), то есть (omega T = 2 pi). Таким образом, круговая частота связана с периодом колебания соотношением
(~omega = frac{2 pi}{T}) . (4)
Более наглядной характеристикой колебаний является обычная частота ν — число колебаний в единицу времени. Если период – это время одного колебания, то величина обратная периоду равна числу колебаний в единицу времени, то есть частоте колебаний
(~nu = frac{1}{T}) . (5)
С помощью соотношений (4)-(5) легко связать круговую и обычную частоты колебаний
(~omega = 2 pi nu) . (5)
Очевидно, что круговая и обычные частоты являются размерными физическими величинами, их размерность обратная размерности времени [ω] = [ν] = [T]-1 = c-1. Для обычной частоты колебаний единица ее измерения называется Герц (сокращенно Гц): частота колебаний 1 Герц означает одно колебание в секунду.
На основании полученного соотношения (6) иногда говорят, что круговая частота колебаний равна числу колебаний за 2π секунд .Однако, по нашему мнению, такое определение является излишним, потому, что, во-первых, попробуйте точно отмерить указанное количество секунд, а, во-вторых, время не обязательно измерять в секундах. Поэтому к этой величине следует относиться как к удобной вспомогательной математической величине – если везде использовать только физически наглядную частоту колебаний ν, то во всех формулах придется дописывать множитель 2π, что приводит к необоснованному перерасходу чернил и бумаги. Также не следует искать особого наглядного смысла в фазе колебаний.
Отметим, что подобные замечания касательно угловой скорости вращения ω (аналогом которой является круговая частота) не обоснованы, так угловая скорость имеет явный физический смысл – угол поворота (измеренный в радианах) в единицу времени.
При движении по окружности вектор скорости точки направлен по касательной к окружности (см. Рис. 189), его модуль равен (upsilon = omega A) (напомним, здесь A — радиус окружности). Если проекция радиус-вектора (~vec r) есть координата точки x , то проекция вектора скорости (~vec upsilon) на ту же ось будет равна скорости движения проекции. Из рисунка не сложно определить, что проекция вектора скорости на ось Ox равна (upsilon_x = -upsilon sin varphi). Используя выражения для модуля скорости и выражение для угла поворота, определяем, что скорость точки при гармоническом колебании (3) зависит от времени по закону
(~upsilon(t) = — omega A sin (omega t + varphi_0)) . (7)
Величина (omega A = upsilon_0) равна максимальной скорости движения точки при гармонических колебаниях. Отметим также, что при гармонических колебаниях скорость точки также изменяется по гармоническому закону.
Аналогичным образом найдем ускорение точки, совершающей гармонические колебания. Так при равномерном движении по окружности ускорение точки является центростремительным, то есть вектор ускорения (~vec a) направлен к центру окружности, а его модуль равен (a = omega^2 A). Из рис. 189 следует, проекция вектора ускорения на выбранную ось Ox равна (a_x = -a cos varphi). Следовательно, зависимость ускорения от времени при гармонических колебаниях имеет вид
(~a(t) = — omega^2 A cos (omega t + varphi_0)) . (8)
Полученные функции зависимости скорости и ускорения точки от времени можно получить непосредственно из закона движения (3). Действительно, мгновенная скорость является первой производной координаты по времени, поэтому функция (7) является первой производной от функции (3).
(~upsilon(t) = (x(t))’ = — omega A sin (omega t + varphi_0)) . (7а)
Аналогично зависимость ускорения от времени (8) является первой производной от скорости (7) или второй производной координаты (3).
(~a(t) = (upsilon(t))’ = (x(t))» = — omega^2 A cos (omega t + varphi_0)) . (8а)
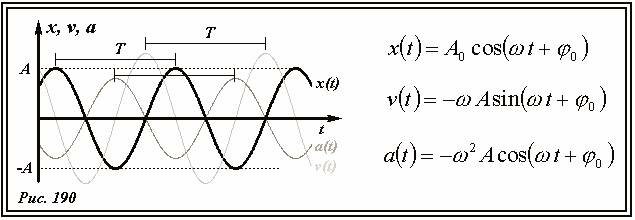
На рис. 190 показаны графики зависимостей координаты x(t), скорости υ(t) и ускорения a(t) точки, совершающей гармонические колебания. Все эти зависимости описываются гармоническими функциями одного периода (одинаковой частоты), сдвинутыми друг относительно друга на четверть периода, (которой соответствует сдвиг фазы на (~frac{pi}{2})). Между нулями и экстремумами этих функций существуют очевидные соответствия: координата движущейся точки достигает максимального и минимального значения, когда ее скорость обращается в нуль; модуль скорости максимален, когда точка проходит через нулевую координату; модуль ускорения максимален, когда скорость равна нулю, а отклонение точки максимально.
Теперь обратим внимание, на чрезвычайно интересное и важное соотношение между ускорением точки и ее координатой[3], которое следует из сравнения функций (8) и (3):
(~a(t) = — omega^2 x) . (9)
При гармонических колебаниях ускорение точки пропорционально его координате, с отрицательным коэффициентом пропорциональности.
При изучении механического движение мы неоднократно подчеркивали, что известная зависимость ускорения тела (~vec a(t, vec r, vec upsilon)) от времени, координат, скорости при известных начальных условиях позволяет однозначно найти закон движения – зависимость координат от времени (~vec r(t)), то есть решить основную задачу механики. Уравнение (9) является частным случаем этой задачи: ускорение зависит от координаты, причем элементарным образом, оно просто пропорционально ей. Следовательно, если на основании динамических законов нам удастся показать, что в некоторой реальной физической системе выполняется уравнение (9), то мы можем однозначно утверждать, что эта система может совершать гармонические колебания.
Мы получили это важнейшее уравнение исходя из рассмотрения закона движения (3). Теперь мы можем решить обратную задачу: если при движении материальной точки ее ускорение связано с координатой соотношением (9), то зависимость координаты от времени описывается функцией:
(~x(t) = A_0 cos (omega t + varphi_0)) . (10)
В этом выражении параметры A0 (амплитуда колебаний) и φ0 (начальная фаза) могут быть любыми – при любых значениях этих параметров, функция (10) удовлетворяет уравнению (9).
Заметим, что, не смотря на указанный произвол в решении уравнения (9), само уравнение уже немало говорит о возможных движениях системы: во-первых, оно указывает, что движение есть гармоническое колебание, во-вторых, однозначно указывает частоту колебаний. Коэффициент пропорциональности в этом уравнении есть квадрат круговой частоты, взятый с противоположным знаком.
Вспомним. Пусть все силы, действующие на тело постоянны, и по величине, и по направлению. В этом случае из законов динамики следует, что движение тела является равноускоренным, причем величина ускорения также определяется на основании этих же законов. Однако, для однозначного нахождения закона движение требуется задание начальных условий.
Чтобы однозначно определить закон движения при гармонических колебаниях необходимо произвольные параметры A0 и φ0 выразить через начальные условия. Итак, пусть заданы начальные условия:
при t = 0 (~left{begin{matrix} x = x_0 \ upsilon = upsilon_0 end{matrix}right.) . (11)
Используя тригонометрическую формулу для косинуса суммы, перепишем выражение (10) в виде
(~x(t) = A_0 cos (omega t + varphi_0) = A_0 (cos varphi_0 cdot cos omega t — sin varphi_0 cdot sin omega t) = A cos omega t + B sin omega t) , (12)
в котором вместо двух произвольных параметров A0 и φ0 введены два новых параметра:
(~begin{matrix} A = A_0 cos varphi_0 \ B = -A_0 sin varphi_0 end{matrix}) . (13)
Аналогичным образом можно преобразовать выражение[4] для скорости частицы (7)
(~upsilon(t) = — omega A_0 sin (omega t + varphi_0) = — omega A_0 (sin omega t cdot cos varphi_0 + cos omega t cdot sin varphi_0) = -omega A sin omega t + omega B cos omega t) . (14)
Подставим в функции (12) и (14) начальные условия (11) получим выражения
(~left{begin{matrix} x(0) = x_0 = A cos 0 + B sin 0 =A \ upsilon(0) = upsilon_0 = -omega A sin 0 + omega B cos 0 = omega B end{matrix}right.) ,
из которых следуют искомые формулы для параметров функции (12):
(~A = x_0 ; B = frac{upsilon_0}{omega}) .
Таким образом, решение уравнения (9) с начальными условиями (11) имеет вид
(~x(t) = x_0 cos omega t + frac{upsilon_0}{omega} sin omega t) . (15)
Не составляет труда представить эту же функцию в виде (10). Так амплитуда колебаний при заданных начальных условиях определяется выражением
(~A_0 = sqrt{A^2 + B^2} = sqrt{x^2_0 + left( frac{upsilon_0}{omega} right)^2}) . (16)
а начальная фаза удовлетворят условию
(~operatorname{tg} varphi_0 = frac{sin varphi_0}{cos varphi_0} = -frac{B}{A} = -frac{upsilon_0}{omega x_0}) . (17)
Подчеркнем еще одно важнейшее свойство гармонических колебаний, описываемых уравнением (9) – период и частота этих колебаний не зависят от их амплитуды. Если амплитуда колебаний определяется начальными условиями, то их частота полностью определяется коэффициентом пропорциональности между ускорением и координатой точки.
Отметим, что формально с математической точки уравнение (9) можно рассматривать в общем виде. Пусть некоторая функция X(t) удовлетворяет условию, что ее вторая производная пропорциональна самой функции (с отрицательным коэффициентом пропорциональности)
(~X» = -omega^2 X) . (18)
тогда эта функция изменяется по гармоническому закону (X(t) = A cos (omega t + varphi_0)), в котором параметры A и φ0 находят из начальных условий, а круговая частота определяется самим уравнением.
17.2.1 Фазовые траектории колебательного движения.
Рассмотрим еще один наглядный способ графического представления произвольных (не только гармонических) колебаний. Пусть закон колебательного движения описывается функцией x(t), которая обязательно является периодической. По известному закону движения можно определить зависимость скорости от времени, как производную от координаты υ(t) = (x(t))′. Введем на плоскости систему декартовую систему координат, вдоль одной из осей которой будем откладывать координату точки, а вдоль другой — ее скорость. Введенная таким образом система называется фазовой плоскостью. Две функции x(t) и υ(t) в любой момент времени определяют на этой плоскости некоторую точку, а геометрическое место этих точек образует некоторую непрерывную линию, которая называется фазовой траекторией.

Приведем пример построения фазовой траектории. Пусть небольшой упругий шарик брошен вертикально вверх (Рис. 191) с начальной скоростью υ0. Если пренебречь сопротивлением воздуха, то скорость шарика будет изменяться со временем по закону
(~upsilon = upsilon_0 — gt) , (1)
где g — ускорение свободного падения. Изменение координаты шарика с течением времени описывается функцией
(~x = upsilon_0 t — frac{gt^2}{2}) . (2)
Поднявшись на максимальную высоту (~x_0 = frac{upsilon^2_0}{2g}), шарик упадет на горизонтальную поверхность и отразится от него. Если удар считать абсолютно упругим, то скорость шарика после удара примет первоначальное значение, после чего движение шарика будет повторяться. Графики зависимостей координаты и скорости шарика[5] от времени показаны на Рис. 192а, б.
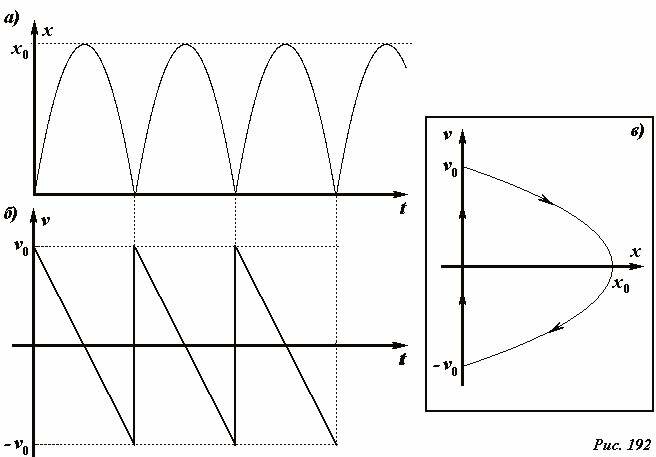
Эти же функции (1), (2) определяют в параметрической форме линию на фазовой плоскости – фазовую траекторию движения шарика. Эта линия показана на Рис. 192 в. Понятно, что при периодическом движении фазовая траектория является замкнутой. На фазовой траектории принято указывать направление движения: при положительной скорости координата возрастает, а при отрицательной скорости координат убывает.
Иногда говорят, что фазовая траектория указывает зависимость скорости от координаты, но такое высказывание не всегда корректно: так одной координате может соответствовать несколько значений скорости (как в рассмотренном примере). А функциональная зависимость требует однозначного соответствия – каждому значению координаты соответствует единственное значение скорости.
Особенно просто выглядит фазовая траектория гармонического колебания, при котором координата и скорость описываются функциями
(~left{begin{matrix} x = A cos (omega t + varphi_0) \ upsilon = -omega A sin (omega t + varphi_0) end{matrix}right.) . (3)
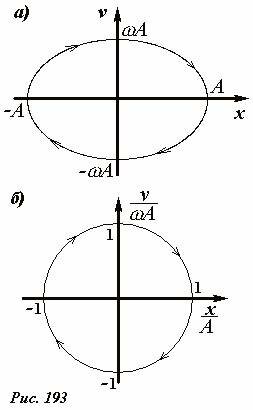
Из этих уравнений следует, что уравнение фазовой траектории можно записать в виде
(~left( frac{x}{A} right)^2 + left( frac{upsilon}{omega A} right)^2 = 1) , (4)
которое является уравнением эллипса[6] с полуосями A и ωA (Рис. 193 а). Еще более предпочтительным является построение фазовой траектории в относительных единицах: когда по одной оси откладывается отношение координаты к амплитуде колебаний (~left( frac{x}{A} right)) , а на другой отношение скорости к максимальной скорости движения (~left( frac{upsilon}{omega A} right)) . В этих координатах
фазовая траектория гармонического колебания является окружностью единичного радиуса (Рис. 193 б). С помощью фазовой диаграммы легко анализировать характер колебания – так отличить окружность от другой замкнутой кривой легко даже «на глаз».
17.2.2 Негармонические колебания. Разложение Фурье.
Сейчас мы покажем, что использование модели гармонических колебаний позволяет описывать и более сложные периодические движения. Еще в 1822 году французский физик и математик Жан Батист Жозеф Фурье в своей работе «Аналитическая теория теплоты» показал, что любая периодическая функция может быть представлена в виде суммы гармонических функций (то есть синусов и косинусов), при чем частоты этих функций являются кратными основной частоте. Так, если период некоторой функции x(t) равен T, то эта функция может быть представлена в виде суммы (разложения Фурье):
(~x(t) = A_0 + (A_1 cos omega t + B_1 sin omega t) + (A_2 cos 2omega t + B_2 sin 2omega t) + (A_3 cos 3omega t + B_3 sin 3omega t)+ ldots = A_0 + sum_k (A_k cos komega t + B_k sin komega t)) .
В общем случае эта сумма должна содержать бесконечно много слагаемых, однако в большинстве практически значимых случаев коэффициенты этого разложения достаточно быстро убывают с ростом номера k (и соответствующе ей частоты (~omega_k = k frac{2 pi}{T})), поэтому практически всегда с достаточной степенью точности можно ограничиться относительно небольшим числом слагаемых.
С разложением периодической функции хорошо знакомы музыканты, которые знают, что каждой ноте (основному тону), взятой на любом музыкальном инструменте соответствует целый набор кратных частот (обертонов). Набор этих колебаний с кратными частотами составляет тембр звука.
Существуют достаточно простые формулы, позволяющие находить коэффициенты разложения Фурье. Мы не собираемся в дальнейшем использовать разложение Фурье, поэтому ограничимся рядом простых примеров разложения периодических функций.
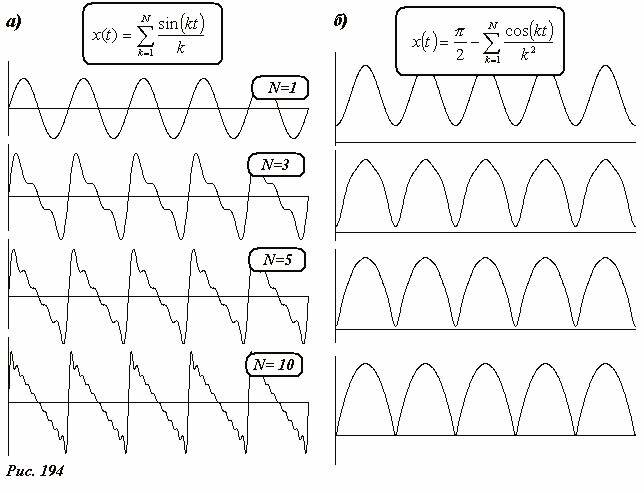
На Рис. 194 а. показаны графики функций (~x(t) = sum_{k=1}^N frac{sin (kt)}{k}) при различных значения числа слагаемых N. Не трудно догадаться, что при больших N эти функции стремятся к рассмотренной выше зависимости скорости от времени, изображенной на Рис. 192. Даже при относительно небольшом N = 5 сходство этих функций уже вполне узнаваемо. Можно найти и разложение Фурье для зависимости координаты от времени в этом же примере, являющейся набором парабол. Эта зависимость выражается суммой (~x(t) = frac{pi}{2} — sum_{k=1}^N frac{cos (kt)}{k^2}).
Графики этих функций для разного числа слагаемых изображены на Рис. 194 б.
Таким образом, с математической точки зрения прыгающий шарик вполне можно описать суммой десяти гармонических колебаний с кратными частотами.
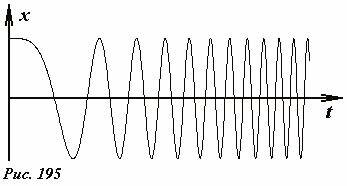
На этом мы заканчиваем рассмотрение кинематического описания колебательного движения, которое, во многом, построено на основании описания равномерного движения материальной точки по окружности. Подчеркнем, что многократное упоминание о равномерности движения не является излишним. Так как при неравномерном движении по окружности, движущаяся материальная точка, конечно, будет возвращаться в исходные положения, но не через равные промежутки времени – поэтому ее движение не будет периодическим, кроме того, скорость и ускорение также не будут изменяться периодически. Для примера, на Рис. 195 показан график зависимости координаты точки, движущейся по окружности равноускоренно. Эта функция описывается выражением (~x = A cos frac{beta t^2}{2}). Видно, что эта функция не периодическая.
Примечания
- ↑ Подчеркнем, что не все колебания являются гармоническими, однако рассматриваемый здесь вид колебаний является простейшей моделью колебательного движения, тем не менее, достаточно часто встречающегося в действительности. Название этого вида движения связано с тем, что функции синус и косинус называются гармоническими функциями, как наиболее совершенные и изящные (по мнению некоторых математиков).
- ↑ Все эти параметры имеют явные аналоги в характеристиках движения по окружности, однако в теории колебательного движения они получили «персональные имена».
- ↑ Это соотношение настолько важно для дальнейшего изложения теории колебаний, что мы его заключили в рамку.
- ↑ Конечно, можно просто взять производную от функции (12).
- ↑ Строго говоря, процесс движения шарика не будет строго периодическим, так как скорость шарика будет изменяться вследствие сопротивления воздуха и неупругости его ударов, но этими факторами мы пренебрежем. Кроме того, удар шарика и изменение его скорости происходит не мгновенно, а в течение некоторого промежутка времени, которой пренебрежимо мало по сравнением со временем его свободного движения.
- ↑ Можно дать следующее «определение» этой хорошо знакомой линии: эллипс – «это круг, который можно вписать в квадрат со сторонами 3×4».
Следующая страница
Содержание:
Колебания материальной точки:
К исследованию колебаний одной материальной точки могут быть сведены многие технические задачи
В качестве примера интегрирования дифференциальных уравнений движения рассмотрим колебания материальной точки. Еще совсем недавно изучение колебаний не входило в программу курсов теоретической механики высших учебных заведений. Но необходимость создания новых методов расчета всевозможных машин и различных сооружений, обладающих большой прочностью при небольшом весе, а также необходимость увеличения скоростей и производигельности машин стимулировали быстрое развитие раздела динамики, называемого теорией колебаний. Раздел, посвященный колебаниям, включен теперь во все программы по теоретической механике.
C основами явлений колебаний удобно ознакомиться сперва на примере, колебания одной материальной точки. Изучение вибраций одной материальной точки интересно также и потому, что к вибрации точки могут быть непосредственно приведены многие практически важные задачи.
Пусть точка M массы m притягивается к точке О силой F, пропорциональной (рис. 162) расстоянию ОМ, а начальная скорость точки M направлена по прямой OM или равна нулю. В таком случае точка M будет двигаться по прямолинейной траектории, вдоль которой мы направим ось х. Начало координат возьмем в точке О (в равновесном положении). Сила F как бы стремится вернуть точку M в равновесное положение О, за что ее называют восстанавливающей силой. Примером такой силы могут служить сила упругости стержня, совершающего малые колебания, или равнодействующая сил веса G и натяжения T нити при малых колебаниях маятника и т. и. Чем больше координата х, тем больше величина этой силы. Вместе с тем сила (точнее говоря, ее проекция на ось Ох) по знаку всегда противоположна знаку координаты х. В самом деле, если точка M находится справа от x начала координат О, то координата х положительна, а сила направлена в отрицательную сторону, и наоборот, если координата х отрицательна, то восстанавливающая сила направлена в положительную сторону. Обозначив коэффициент пропорциональности между силой и расстоянием через с (причем с > 0), выразим восстанавливающую силу формулой
F= — сх. (131)
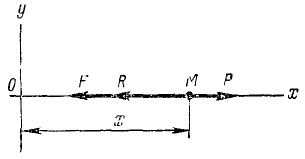
Рис. 162
Пусть на точку M во время ее движения действует сила сопротивления R, пропорциональная скорости точки и направленная против скорости. Таким образом, если точка M движется вправо (х > 0), то сила сопротивления направлена влево (R < 0), и, наоборот, если х < 0, то R > 0. Обозначив коэффициент пропорциональности через а (причем а > 0), мы определим силу сопротивления (выражаясь точнее, ее проекцию на ось Ох) формулой
R = — ах. (132)
Кроме того, пусть на точку M действует возмущающая сила Р, т. е. некоторая дополнительная сила, вызывающая изменение движения, обусловленного основной силой F. Возмущающая сила направлена по прямолинейной траектории точки M и, периодически изменяя свою величину и знак, раскачивает точку M то в ту, то в другую сторону. Мы ограничимся рассмотрением простейшего случая и предположим, что сила P изменяется с течением времени по закону синуса:
P = H sin pt. (133)
Очевидно, что сила P изменяется в пределах от +Н до —Н. Пример такой силы приведен в задаче № 110.
Напишем дифференциальное уравнение движения точки M:

Разделив обе части уравнения на т, введем обозначения
 (134)
(134)
и перенесем члены, содержащие х или его производные, влево:
х + 2nx + k2x =h sin pt. (135)
Мы имеем неоднородное линейное дифференциальное уравнение с постоянными коэффициентами. Общее решение такого уравнения складывается из: 1) общего решения соответствующего однородного уравнения, т. е. уравнения (135) без правой части, и какого-либо частного решения неоднородного уравнения (135).
Для интегрирования уравнения
х + 2nx + k2x = 0
составим характеристическое уравнение
z2 + 2nz + k2 = 0.
Если n < k («малое сопротивление»), то характеристическое уравнение имеет комплексные корни:

и общее решение однородного уравнения имеет вид
 (136)
(136)
где C1 и C2 — постоянные интегрирования. Эти постоянные можно определить лишь после того, как будет получено частное решение неоднородного уравнения (135).
Частное решение неоднородного уравнения (135) при p≠k будем искать вида
х= В sin (pt — δ).
Подберем такие постоянные В и δ, при которых написанное выражение удовлетворяет уравнению (135). Найдем первую и вторую производные от х по времени:
x = Bp cos (pt— δ); х — — Bp2 sin (pt— δ)
и подставим в (135) написанное выражение х и его производных:
— Bp2 sin (pt — δ) + 2nBp cos (pt — δ) + k2B sin (pt — δ) = h sin pt.
Преобразуем правую часть этого равенства:
h sin pt = h sin (pt — δ +δ) = h sin (pt — δ) cos ∂ + h cos (pt — δ) sin δ.
Перенеся все члены влево и собирая члены, содержащие sin(pt— δ) и cos (pt — δ), получим
[В (k2—p2)-h cos δ] sin (pt — δ) + (2Bnp-hsin δ) cos (pt — δ) = O.
Это равенство обращается в тождество, если
В (k2— р2) = h cos δ; 2Bnp = h sin δ,
или
 (137)
(137)
Складывая общее решение (136) однородного уравнения с найденным частным решением неоднородного уравнения, получим общее решение неоднородного уравнения (135) в таком виде:

 (138)
(138)
Прежде чем исследовать сложное колебательное движение точки под действием сил F, R и P, выражаемое уравнением (138), рассмотрим более простые движения, которые точка совершала’ бы под действием одной силы F или же под действием силы F и какой-либо- одной из двух остальных R или Р.
Точка, движущаяся по прямой, совершает под действием восстанавливающей силы гармоническое колебание
Свободные колебания без сопротивления
Предположим, что на материальную точку M (см. рис. 162 на стр. 274) действует только восстанавливающая сила (131), сила же сопротивления (132) и возмущающая сила (133) равны нулю. Пусть начальная скорость точки M направлена по прямой MO или равна нулю. В таком случае точка M будет двигаться по прямой OM (по оси Ох), дифференциальное и кинематическое уравнения ее движения мы получим, положив в (135) и в (138) n и h равными нулю. В самом деле, если сила сопротивления R=O, то, следовательно, α = 0, потому что R=— ах и х переменная величина. Если же a = 0, то равно нулю и n, которое согласно (134) равно  . Аналогично, равенство нулю возмущающей силы означает, что равны нулю H и h.
. Аналогично, равенство нулю возмущающей силы означает, что равны нулю H и h.
В таком случае уравнение (135) принимает вид
х + k2x = 0, (139)
а его интеграл
х = C1 cos kt + C2sin kt. (139/)
Этому уравнению придадим более удобный вид, для чего выразим, постоянные интегрирования C1 и C2 через две другие постоянные величины А и β, однозначно связанные с C1 и C2 соотношениями
C1 = A sinβ и C2 = A cos β. (140″)
Тогда
x = A sin (kt+ β). (140)
Это уравнение является одним из важнейших уравнений в теории колебаний и описывает наиболее простое колебательное движение, называемое гармоническим. Еще в древности было известно, что если некоторая точка M’ (рис. 163) равномерно движется по окружности радиуса О’М’ — А со скоростью kA, то проекция M этой точки на какую-либо ось Ох, лежащую в плоскости окружности, совершает гармонические колебания. Мы воспользуемся рис. 163, чтобы нагляднее ознакомить читателя с параметрами гармонического колебания.
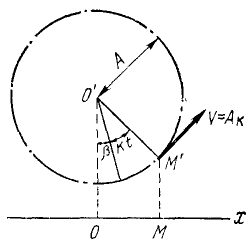
Рис. 163
Если точка M’ опишет полную окружность, то точка M’ совершит одно полное колебание.
Время одного полного колебания точки M (или, что то же, время,в течение которого точка M’ описывает одну полную окружность) называют периодом -τ0 колебаний.
Угловая скорость k, с которой поворачивается радиус-вектор  при равномерном движении точки M’, равна циклической, круговой или угловой частоте колебаний точки М. Эту величину обычно коротко называют частотой, хотя, как будет видно из дальнейшего, оба понятия не вполне идентичны.
при равномерном движении точки M’, равна циклической, круговой или угловой частоте колебаний точки М. Эту величину обычно коротко называют частотой, хотя, как будет видно из дальнейшего, оба понятия не вполне идентичны.
Период и угловая частота связаны простым соотношением, которое становится очевидным, если учесть, что τ0—это время, в течение которого  , вращаясь с угловой скоростью k, поворачивается на 2π:
, вращаясь с угловой скоростью k, поворачивается на 2π:
 и
и  (141)
(141)
или ввиду (134)
 (142)
(142)
Период имеет размерность времени
[τ] = T1.
Частота имеет размерность угловой скорости
[k] = T1.
Из (141) видно, что круговая частота k равна числу полных колебаний, совершаемых в 2π сек. Частота ν колебаний пропорциональна круговой (циклической, угловой) частоте k и равна . В технике и в физике частоту обычно измеряют в герцах (гц). 1 гц — частота, равная одному полному колебанию (циклу) в секунду. Иначе говоря, герц есть частота такого периодического процесса, который повторяется каждую секунду. Обратите внимание на то, что частота и период гармонических колебаний зависят от массы точки и коэффициента с восстанавливающей силы и не зависят от начальных данных.
. В технике и в физике частоту обычно измеряют в герцах (гц). 1 гц — частота, равная одному полному колебанию (циклу) в секунду. Иначе говоря, герц есть частота такого периодического процесса, который повторяется каждую секунду. Обратите внимание на то, что частота и период гармонических колебаний зависят от массы точки и коэффициента с восстанавливающей силы и не зависят от начальных данных.
Максимальное отклонение А точки M от среднего (равновесного) положения О в ту или в другую сторону (или, что то же, радиус круговой траектории точки М’) называют амплитудой. Амплитуду измеряют в единицах длины:
[A] = T1.
Аргумент синуса (kt + β) называют фазой колебания, a β—начальной фазой. Физический смысл фазы колебания выявляется при сравнении двух колебаний с одинаковыми частотами, но с разными начальными фазами. Колебание с фазой (kt+ β) опережает колебание с фазой kt, а колебание с фазой (kt — β) отстает от него (разумеется, при положительном β).
Напомним, что А и β являются постоянными интеграции, а следовательно, их определяют по начальным данным. Пусть в начальное мгновение t = 0, x=x0 и x=x0. Продифференцировав (140) по времени, получим х = Ak cos (kt + β), и подставляя начальные значения:
х0 = A sinβ и х0 = Ak cos β,
получим
 (143)
(143)
Из тех же равенств можно определить и начальную фазу  . Амплитуда и начальная фаза зависят от частоты и от начальных данных.
. Амплитуда и начальная фаза зависят от частоты и от начальных данных.
Задача №1
Груз весом 2 T подвешен на тросе (рис. 164). При равномерном спуске груза со скоростью υ = 5м/сек произошла неожиданная задержка верхнего конца троса вследствие защемления троса в обойме блока. Пренебрегая весом троса, определить его наибольшее натяжение при последующих колебаниях груза, если коэффициент жесткости троса с = 4 T/см.
Решение. Примем следующие единицы измерений: длина—в см, время — в сек, сила—в Т. Рассмотрим движение груза. На груз действуют две силы: вертикально вниз вес груза 2T, вертикально вверх — натяжение троса. Груз спускался равномерно, следовательно, до защемления натяжение троса равнялось весу груза. В этом равновесном положении его застала авария. После защемления троса груз не остановился мгновенно. В это мгновение он имел скорость 5 м/сек и продолжал опускаться. Но по мере опускания груза сила натяжения троса возрастала от своего начального значения 2T. Ускорение груза направлено по силе и пропорционально ей. Поэтому опускание груза было замедленным и в некоторое мгновение скорость груза, перейдя через нуль, стала направленной вверх, в направлении силы и ускорения. Движение вверх было ускоренным, но по мере того как груз поднимался, растяжение троса, а следовательно, и его натяжение уменьшались, а потому уменьшалось ускорение груза, скорость же продолжала увеличиваться до момента прохождения через равновесное положение. После этого груз, набрав скорость, продолжал подниматься, ио замедленно, так как натяжение троса стало меньше силы веса и равнодействующая приложенных к грузу сил была направлена вниз. Затем скорость стала равной нулю, груз начал падать вниз, натяжение троса возрастало и движение повторялось снова неопределенное количество раз.
Начало О системы отсчета выберем обязательно в равновесном положении груза, относительно которого происходят колебания, направив ось Ox вертикально вниз (рис. 164). В начальное мгновение (в момент защемления троса) было: x0= 0; x0= 500 см/сек. Квадрат круговой частоты определим по (134). После подстановки в формулу  имеем
имеем  . Определим амплитуду по формуле (143):
. Определим амплитуду по формуле (143):
Таким образом, при равновесном положении груза натяжение троса равно 2T; когда же груз опустился на одну амплитуду, то трос растянулся еще на 11,28 см, а при жесткости троса в 4 T/см натяжение его увеличилось еще на 45,12 Т.
Ответ. 47,1 T.
Натуральный логарифм отношения двух последующих амплитуд затухающих колебаний называют логарифмическим декрементом
Свободные колебания с сопротивлением
Движение под действием восстанавливающей силы и силы сопротивления будем называть свободными колебаниями. Мы только что убедились, что свободные колебания без сопротивления являются гармоническими и, раз возникнув, они повторялись бы до тех пор, пока их не прекратила бы или не изменила бы какая-нибудь внешняя сила. Пусть возмущающая сила отсутствует (P = 0, H = 0, h = 0), а на точку действуют силы F=-cx и R =—ах. Дифференциальное уравнение (135) движения точки M принимает вид
х + 2nx 4- k2x = 0, (144)
а его интеграл получим, положив в (138) h=0:

или, если воспользуемся соотношениями (140),
 (145)
(145)
Постоянные А и β определяют по начальным данным.
Наиболее существенное отличие уравнения (145) от уравнения (140), иначе говоря, наиболее существенное изменение в свободном колебании точки М, внесенное наличием силы сопротивления, заключается в множителе e-nt, который с течением времени непрерывно уменьшается, вследствие чего амплитуда Ae-nt колебаний с сопротивлением убывает по экспоненциальному закону, асимптотически приближаясь к нулю. Такое колебание называют затухающим.
Переходя к определению периода затухающих колебаний, обратим внимание на то, что вообще периодом периодического движения называют промежуток времени между двумя последовательными прохождениями точки (или системы) через одно и то же положение водном и том же направлении. В случае затухающих колебаний только равновесное положение удовлетворяет такому определению периода, через всякое же другое положение точка M (или любая система, совершающая затухающие колебания) проходит через неравные промежутки времени (см. рис. 165). Поэтому под периодом затухающих колебаний понимают промежуток времени τ1 между двумя последовательными прохождениями точки M (или системы) через положение равновесия в одинаковом направлении. В таком же смысле колебания, описываемые уравнением (145), могут быть названы изохронными. Период затухающих колебаний можно определить но формуле
 (146)
(146)
Проф. И. М. Бабаков в учебнике «Теория колебаний» рекомендует для практических расчетов более удобную формулу:
 (146/)
(146/)
Сравнивая (141) и (146), мы видим, что сопротивление увеличивает период свободных колебаний, но незначительно.
Гораздо больше оно влияет на убывание амплитуд. Так, например, при n = 0,05 k сопротивления увеличивают период на 0,125%, а амплитуда за время одного полного колебания уменьшается более чем на 25%. На рис. 165 изображен график затухающих колебаний для случая n = 0,05 k, позаимствованный из «Лекций» проф. Е. Л. Николаи.
Отношение абсолютных значений двух последовательных амплитудных отклонений точки от равновесного положения называют коэффициентом затухания:
 (147)
(147)
Для характеристики быстроты убывания амплитуды удобнее пользоваться натуральным логарифмом коэффициента затухания, называемым логарифмическим декрементом колебаний:
 (147/)
(147/)
На рис. 165 пунктиром изображены кривые, уравнения которых x= Ае-n и х = —Ae-nt. График затухающих колебаний расположен между этими двумя кривыми и поочередно их касается.
Задача №2
Маятник, масса которого равна 1 кг и период качания в безвоздушной среде τ0=l сек, заставили качаться вереде, сопротивляющейся но закону R =—2х н. Определить: 1) период затухающих колебаний маятника и 2) уменьшение амплитуды в течение трех периодов.
Решение. Определим параметры колебаний.
Круговая частота. Период τ0=l сек= , откуда k=2π = G,28.
, откуда k=2π = G,28.
Коэффициент α=2; m=1; 2n= , откуда n=l.
, откуда n=l.
Период затухающих колебаний  , или по (146′),
, или по (146′),
 . Логарифмический декремент
. Логарифмический декремент  . Коэффициент затухания
. Коэффициент затухания  .
.
Отношение каждого максимального отклонения к последующему (через полпериода) равно коэффициенту затухания, следовательно, если амплитуду при первом размахе принять за 1, то следующие уменьшаются в отношении  .
.
Под действием восстанавливающей и возмущающей сил точка совершает сложное колебание, являющееся результатом наложения трех гармонических колебаний: свободного, сопровождающего свободного и вынужденного
Вынужденные колебания без сопротивления
Пусть на точку М, движущуюся по оси Ох, действуют две силы — восстанавливающая F=— CX и возмущающая P =H sin pt, направленные также по оси Ох. Величина pt может быть названа фазой силы, постоянную р назовем круговой частотой возмущающей силы, а период этих изменений обозначим через τ. Действие сопротивления мы пока не учитываем, поэтому, положив в уравнении (135) n = 0, получим следующее дифференциальное уравнение вынужденных колебаний без сопротивления:
x+ k2x = h sin pt. (148)
Чтобы найти решение этого уравнения, надо в (138) положить равным нулю не только n, но и δ, так как согласно (137) δ = 0 при n = 0. Имеем

Определим постоянные. Если в начальное мгновение х = x0 и x = χ0, то

и
 (149)
(149)
Первые два слагаемых описывают свободные колебания с частотой k. Воспользовавшись соотношениями (140″), эти два слагаемых можно представить в виде x1 = A sin (kt + β). Если в начальное мгновение х = х= 0, то эти колебания во все время действия возмущающей силы не возникают. Третье слагаемое
— гармоническое колебание, происходящее с частотой k свободных колебаний, но с амплитудой, зависящей от возмущающей силы. Это колебание всегда, при любых начальных условиях, сопровождает вынужденные колебания и его называют свободным сопровождающим колебанием. Четвертое слагаемое
 (149/)
(149/)
описывает вынужденные колебания. Таким образом, колебания точки являются результатом линейного наложения трех гармонических колебаний: 1) свободных, 2) сопровождающих свободных и 3) вынужденных (рис. 166):
 (149//)
(149//)
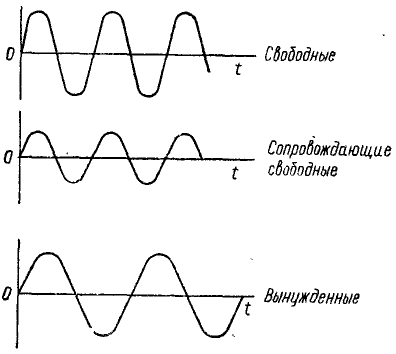
Рис. 166
На схеме (рис. 166) приведены только частоты этих колебаний, но разумеется, не изображены амплитуды и начальные фазы.
Вынужденные колебания происходят с частотой р, равной частоте возмущающей силы. Они не зависят от начальных данных.
Как видно из (143), для изменения амплитуды свободных колебаний достаточно изменить начальное отклонение или начальную скорость. Напротив, для изменения амплитуды вынужденных колебаний надо изменить возмущающую силу, что обычно бывает сопряжено с необходимостью преобразования конструкции.
Если частота р вынужденных колебаний меньше частоты k собственных (случай «малой» частоты), то амплитуда вынужденных колебаний , а фаза pt вынужденных колебаний совпадет
, а фаза pt вынужденных колебаний совпадет
с фазой pt возмущающей силы. По если р > k (случай «большой» частоты), то выражение, написанное для А3, становится отрицательным, однако амплитуда не может быть отрицательной. Это кажущееся несоответствие объясняется тем, что при р > k фаза вынужденных колебаний противоположна фазе возмущающей силы и уравнение вынужденных колебаний имеет вид
Резонанс
Если частоты собственных и вынужденных колебаний близки между собой, то амплитуды получаются очень большими. Напомним, что при интегрировании уравнения (135) мы положили p≠k. Если р= k, то дифференциальное уравнение (148) имеет вид
x-k2x = h sin kt (148′)
Будем искать частное решение вида
x= Bt cos kt.
Определив х =— 2Bk sin kt— Btk2 cos kt и подставив его вместе с х в дифференциальное уравнение, получим
— 2Bk sin kt = h sin kt,
откуда
Находим общее решение дифференциального уравнения движения:

Дифференцируем по времени:

Если в начальное мгновение x=x0 и x=x0, то
и общее решение принимает вид

или, полагая  получим
получим
 (148»’)
(148»’)
Следовательно, и при равенстве частот движение точки состоит из трех колебательных движений, однако вынужденные колебания представлены непериодическим членом, в коэффициент которого входит множителем время. C течением времени это третье слагаемое, называемое вековым членом, безгранично растет по абсолютной величине. Размах вынужденных колебаний непрерывно растет по линейному закону. Это явление называется резонансом. График вынужденных колебаний при резонансе представлен на рис. 167.
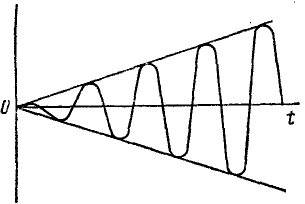
Рис. 167
Задача №3
Груз M подвешен в точке В к пружине AB (рис. 168), верхний конец А которой прикреплен к поступательно движущейся кулисе. Кривошип кулисного механизма имеет длину а = 0,02 м и вращается с угловой скоростью  , вследствие чего точка А совершает гармонические колебания по закону хА =0,02 sin 7t м. Определить вынужденные колебания груза М, если его вес G = 3,6 н, а жесткость пружины с = 36 н/м.
, вследствие чего точка А совершает гармонические колебания по закону хА =0,02 sin 7t м. Определить вынужденные колебания груза М, если его вес G = 3,6 н, а жесткость пружины с = 36 н/м.
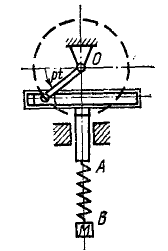
Рис. 168
Решение. Составим дифференциальное уравнение движения груза М. Начало координат выберем в точке, с которой центр тяжести груза совладал в момент начала движения (при t = 0), когда верхний конец А пружины, совершающей гармонические колебания вместе с кулисой, занимал свое среднее положение. При сделанном нами выборе начала отсчета (в равновесном положении груза) вес G = 3,6 н уравновешивался статическим натяжением пружины с λcr = 36 ∙ 0,1. Наличие этих двух взаимно уравновешенных сил эквивалентно их отсутствию, а потому мы можем их отбросить и в дальнейшем рассматривать движение центра тяжести груза лишь под действием натяжения пружины, обусловленного только ее динамической деформацией, т. е. только деформацией пружины при колебании груза около равновесного положения.
При t ≠ 0 положение центра тяжести груза определяется координатой х, получающейся от суммирования двух перемещений: динамической деформации пружины и перемещения a sin pt верхнего конца А пружины. Следовательно, динамическая деформация пружины равна разности перемещений ее нижнего конца В и верхнего конца А, т. е. равна х—α sin pt . Дифференциальное уравнение движения центра груза имеет вид
mx = — с (х—a sin pt).
Деля обе части уравнения на m и вводя обозначения  и
и  , придадим этому уравнению знакомый нам вид (148)
, придадим этому уравнению знакомый нам вид (148)
x + k2x = h sin pt,
где 
Подставляя в (149′), находим вынужденные колебания груза.
Ответ. 0,04 sin 7t.
Задача №4
Статический прогиб рессор товарного вагона равен 5 см. Определить критическую скорость вагона, при которой начнется «галопирование» вагона, если на стыках рельсов вагон испытывает толчки, вызывающие вынужденные колебания на рессорах: длина рельсов равна 12 м.
Решение. Жесткость рессор  , частота собственных колебаний
, частота собственных колебаний
Если поезд идет со скоростью υ см/сек, то вагон получает толчки на стыках через каждые  сек. Таков период τ возмущающей силы. Частота возмущающей силы
сек. Таков период τ возмущающей силы. Частота возмущающей силы  , откуда
, откуда  . Галопирование вагона произойдет при резонансе, т. е. при равенстве частот собственных и вынужденных колебаний. Подставляя в выражение, полученное для скорости, р = k = 14, найдем
. Галопирование вагона произойдет при резонансе, т. е. при равенстве частот собственных и вынужденных колебаний. Подставляя в выражение, полученное для скорости, р = k = 14, найдем
Чтобы выразить скорость в км/ч, умножим выраженную в см/ceκ скорость на 0,036.
Ответ. υ=96 км/ч.
Если к точке приложены восстанавливающая и возмущающая сила и сила сопротивления, то свободные колебания затухают и остаются только вынужденные
Влияние сопротивления на вынужденные колебания
Если на точку, кроме восстанавливающей и возмущающей сил, действует также и сила R сопротивления, то движение точки описывается дифференциальным уравнением (135) и его решением (138).
Первый член правой части (138) с возрастанием t стремится к нулю, и соответствующие ему колебания точки с течением времени затухают, поэтому ими можно пренебречь. Остаются только вынужденные колебания (рис. 169):
 (150)
(150)
Они происходят с частотой возмущающей силы, сопротивление не влияет на период вынужденных колебаний. Амплитуда не зависит от начальных условий и времени и не изменяется с течением времени.
Предположим, что возмущающая сила сохраняет свое максимальное значение Н. При равновесии под действием такой силы и восстанавливающей силы F =— сх точка M получила бы так называемое статическое отклонение
Из этого соотношения найдем максимальное ускорение точки M под действием возмущающей силы: h=k2xст и, подставляя это значение h в выражение (150), выразим амплитуду вынужденных колебаний равенством

Отношение частоты вынужденных колебаний к частоте собственных колебаний
 (151)
(151)
носит название коэффициента расстройки и отношение величины n, измеряемой в ceκ-1, к частоте собственных колебаний называют безразмерным коэффициентом вязкости:
 (151′)
(151′)
Введя эти обозначения в предыдущее равенство и разделив обе части его на xст, получим:
 (152)
(152)
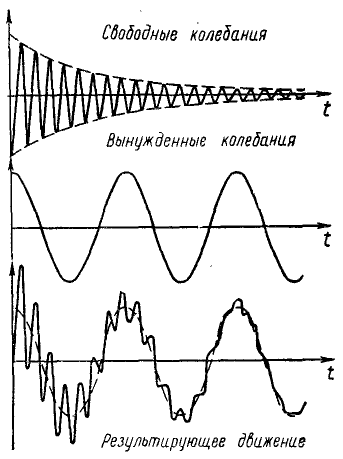
Рис. 169
Величина η—коэффициент динамичности — позволяет охарактеризовать динамический эффект, вызываемый возмущающей силой.
Коэффициент динамичности η зависит от двух величин (z и β).
Задавшись каким-либо значением β, и откладывая по оси абсцисс различные значения z, а по оси ординат—соответствующие значения коэффициента динамичности η, получим, так называемые, резонансные кривые. На рис. 170 изображены резонансные кривые для значений безразмерного коэффициента вязкости: 0,25, 0,15. и 0,10. Пунктиром нанесена уходящая в бесконечность при  резонансная кривая, соответствующая β = 0, т. е. вынужденным колебаниям без сопротивления.
резонансная кривая, соответствующая β = 0, т. е. вынужденным колебаниям без сопротивления.
Как показывает график (рис. 170) в областях, достаточно далеких от резонанса, амплитуды вынужденных колебаний с сопротивлением почти не зависят от безразмерного коэффициента вязкости. В этих областях при вычислении амплитуд вынужденных колебаний можно не учитывать сопротивлений и пользоваться более простой формулой
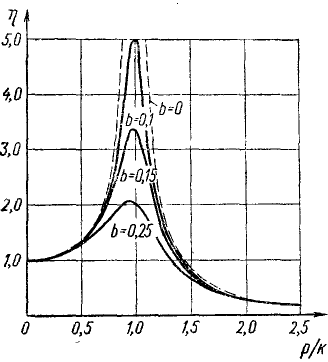
Рис. 170
При резонансе (р = k) амплитуда вынужденных колебаний при наличии сопротивлений остается конечной, но наибольшее значение амплитуда имеет, если 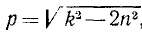 , в чем легко убедиться, определив максимум амплитуды при различных р, считая h, k и п данными.
, в чем легко убедиться, определив максимум амплитуды при различных р, считая h, k и п данными.
В вынужденных колебаниях с сопротивлением всегда бывает сдвиг фазы колебания по отношению к фазе .возмущающей силы. Величина этого сдвига определяется формулой (137).
Заметим, что все сказанное здесь относительно малых колебаний материальной точки полностью соответствует малым колебаниям материальной системы с одной степенью свободы.
- Количество движения
- Момент количества движения
- Мощность и работа силы
- Потенциальная энергия
- Естественный и векторный способы определения движения точки
- Координатный способ определения движения точки
- Касательное и нормальное ускорения точки
- Основные законы динамики