VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Касательная, нормальная плоскость, соприкасающаяся плоскость, бинормаль, главная нормаль, репер Френе
Краткие теоретические сведения
Кривая в пространстве
Рассмотрим в пространстве гладкую кривую $gamma$.
Пусть точка $M$ принадлежит данной кривой и отвечает значению параметра $t=t_0$. Тогда радиус-вектор и координаты данной точки равны:
begin vec=vec(t_0), quad x_0=x(t_0),, y_0=y(t_0), , z_0=z(t_0). end
Пусть в точке $M$ $ vec(t_0)neqvec<0>$, то есть $M$ не является особой точкой.
Касательная к кривой
Касательная к кривой, проведенная в точке $M$, имеет направляющий вектор коллинеарный вектору $vec(t_0)$.
Пусть $vec$ — радиус-вектор произвольной точки касательной, тогда уравнение этой касательной имеет вид
Здесь $lambdain(-infty,+infty)$ — параметр, определяющий положение точки на касательной (то есть разным значениям $lambda$ будут соответствовать разные значения $vec$).
Если $vec=$, $M = (x(t_0), y(t_0), z(t_0))$, то можно записать уравнение касательной в каноническом виде:
Нормальная плоскость
Плоскость, проходящую через данную точку $M$ кривой $gamma$ перпендикулярно касательной в этой точке, называют нормальной плоскостью.
Пусть $vec$ — радиус-вектор произвольной точки нормальной плоскости, тогда ее уравнение можно записать в векторном виде через скалярное произведение векторов $vec-vec(t_0)$ и $vec(t_0)$:
Если расписать покоординатно, то получим следующее уравнение:
begin x'(t_0)cdot(X-x(t_0))+y'(t_0)cdot(Y-y(t_0))+z'(t_0)cdot(Z-z(t_0))=0. end
Соприкасающаяся плоскость
Плоскость, проходящую через заданную точку $M$ кривой $gamma$ параллельно векторам $vec(t_0)$, $vec(t_0)$, когда они неколлинеарны, называют соприкасающейся плоскостью кривой.
Если $vec$ — радиус-вектор произвольной точки соприкасающейся плоскости, то ее уравнение можно записать через смешанной произведение трех компланарных векторов $vec-vec(t_0)$, $vec(t_0)$, $vec(t_0)$:
Зная координаты точки и векторов, определяющих плоскость, запишем смешанное произведение через определитель. Получим следующее уравнение соприкасающейся плоскости:
begin left| begin X-x(t_0) & Y-y(t_0) & Z-z(t_0) \ x'(t_0) & y'(t_0) & z'(t_0)\ x»(t_0) & y»(t_0) & z»(t_0) \ end right|=0 end
Бинормаль и главная нормаль
Прямая, проходящая через точку $M$ кривой $gamma$ перпендикулярно касательной к кривой в этой точке, называется нормалью.
Таких кривых можно провести бесконечно много, все они образуют нормальную плоскость. Мы выделим среди нормалей две — бинормаль и главную нормаль.
Нормаль, перпендикулярную соприкасающейся плоскости, называют бинормалью.
Нормаль, лежащую в соприкасающейся плоскости, называют главной нормалью.
Из определения бинормали (перпендикулярна касательной и перпендикулярна соприкасающейся плоскости) следует, что в качестве ее направляющего вектора мы можем взять векторное произведение $ vec(t_0)timesvec(t_0)$, тогда ее уравнение можно записать в виде:
Как и раньше, $vec$ — радиус-вектор произвольной точки бинормали. Каноническое уравнение прямой:
Из определения главной нормали (перпендикулярна касательной и перпендикулярна бинормали) следует, что в качестве ее направляющего вектора можно взять векторное произведение $vec(t_0) timesleft[vec(t_0),vec(t_0)right]$:
Уравнение в каноническом виде распишите самостоятельно.
Спрямляющая плоскость
Плоскость, проходящую через заданную точку $M$ кривой $gamma$ перпендикулярно главной нормали, называют спрямляющей плоскостью.
Другое определение: Плоскость, определяемую касательной к кривой и бинормалью в той же точке, называют спрямляющей плоскостью.
Второе определение позволяет записать уравнение спрямляющей плоскости через смешанное произведение трех компланарных векторов, определяющих эту плоскость $vec-vec(t_0)$, $vec(t_0)$, $vec(t_0)timesvec(t_0)$: begin left(vec-vec(t_0),, vec(t_0),, vec(t_0)timesvec(t_0)right)=0. end Зная координаты соответствующих векторов, можно легко записать это смешанное произведение через определитель, раскрыв который, вы получите общее уравнение спрямляющей плоскости.
Репер Френе
Орт (то есть единичный вектор) касательной обозначим: $$ vec<tau>=frac<vec(t_0)><|vec(t_0)|>. $$ Орт бинормали: $$ vec<beta>=frac<vec(t_0)timesvec(t_0)><|vec(t_0)timesvec(t_0)|>. $$ Орт главной нормали: $$ vec<nu>=frac<vec(t_0) times[vec(t_0),,vec(t_0)]><|vec(t_0) times [vec(t_0),,vec(t_0)]|>. $$
Правая тройка векторов $vec<tau>$, $vec<nu>$, $vec<beta>$ называется репером Френе.
Решение задач
Задача 1
Кривая $gamma$ задана параметрически:
Точка $M$, принадлежащая кривой, соответствует значению параметра $t=0$. Записать уравнения касательной, бинормали, главной нормали, нормальной плоскости, соприкасающейся плоскости и спрямляющей плоскости, проведенных к данной кривой в точке $M$. Записать векторы репера Френе.
Решение задачи 1
Задачу можно решать разными способами, точнее в разном порядке находить уравнения прямых и плоскостей.
Начнем с производных.
begin 1cdot X+0cdot Y+1cdot (Z-1)=0,, Rightarrow ,, X+Z=1. end
begin left| begin X-0 & Y-0 & Z-1 \ 1 & 0 & 1\ 0 & 2 & 1 \ end right|=0 end Раскрываем определитель, получаем уравнение: begin -2X-Y+2Z-2=0 end
begin 1cdot X-4cdot Y-1cdot (Z-1)=0,, Rightarrow ,, X-4Y-Z+1=0. end
Поскольку направляющий вектор главной нормали у нас был найден как векторное произведение направляющих векторов касательной и бинормали, тройка $vec<tau>$, $vec<nu>$, $vec<beta>$ не будет правой (по определению векторного произведения вектор $vec<tau>timesvec<beta>$ направлен так, что тройка векторов $vec<tau>$, $vec<beta>$, $vec<nu>=vec<tau>timesvec<beta>$
— правая). Изменим направление одного из векторов. Например, пусть
Теперь тройка $vec<tau>$, $vec<nu>$, $vec<tilde<beta>>$ образует репер Френе для кривой $gamma$ в точке $M$.
Задача 2
Написать уравнение соприкасающейся плоскости к кривой $$ x=t,,, y=frac<2>,,, z=frac<3>, $$ проходящей через точку $N(0,0,9)$.
Решение задачи 2
Нетрудно заметить, что точка $N$ не принадлежит заданной кривой $gamma$. Следовательно соприкасающаяся плоскость проведена в какой-то точке $M(t=t_0)ingamma$, но при этом плоскость проходит через заданную точку $N(0,0,9)$.
Найдем значение параметра $t_0$.
Для этого запишем уравнение соприкасающейся плоскости, проведенной в произвольной точке $M(t=t_0)$. И учтем, что координаты $N$ должны удовлетворять полученному уравнению.
Соприкасающаяся плоскость определяется векторами $vec(t_0)$, $vec(t_0)$, поэтому записываем определитель begin left| begin X-t_0 & Y-t_0^2/2 & Z-t_0^3/3 \ &&\ 1 & t_0 & t^2_0 \ &&\ 0 & 1 & 2t_0 end right|=0 quad Rightarrow end
begin (X-t_0)cdot t_0^2 — (Y-t_0^2/2)cdot 2t_0 + (Z-t_0^3/3)=0. end Подставляем вместо $X$, $Y$, $Z$ координаты точки $N$: $X=0$, $Y=0$, $Z=9$, упрощаем и получаем уравнение относительно $t_0$: begin 9-t_0^3/3=0 quad Rightarrow quad t_0=3. end Подставив найденное $t_0$ в записанное ранее уравнение, запишем искомое уравнение соприкасающейся плоскости: $$ 9X-6Y+Z-9=0. $$
Задача 3
Через точку $Pleft(-frac45,1,2right)$ провести плоскость, являющуюся спрямляющей для кривой: $$ x=t^2,,, y=1+t,,, z=2t. $$
Решение задачи 3
Как и в предыдущей задаче нам неизвестны координаты точки, в которой проведена спрямляющая плоскость к заданной кривой. Найдем их.
Спрямляющая плоскость определяется касательной и бинормалью, то есть векторами $vec(t_0)$ и $vec(t_0)timesvec(t_0)$.
Записываем уравнение спрямляющей плоскости: begin left| begin X-t_0^2 & Y-1-t_0 & Z-2t_0 \ 2t_0 & 1 & 2\ 0 & 4 & -2 end right|= 0 end
Раскрываем определитель. Подставляем в уравнение координаты точки $P$: $X=-4/5$, $Y=1$, $Z=2$. Упрощаем и получаем уравнение для нахождения $t_0$: begin 5t_0^2-8t_0-4=0 ,, Rightarrow ,, t_<01>=2,, t_<02>=-frac25. end
Уравнения соприкасающихся плоскостей к заданной кривой, проходящих через $P$, принимают вид: begin & 5X-4Y-8Z+24=0,\ & 25X+4Y+8Z=0. end
Касательный вектор и касательное пространство к многообразию
Пусть на многообразии M задана кривая x = x(t) , a £ t £ b , где x – точка многообразия. Пока кривая находится в области Up действия локальных координат  , уравнения кривой можно записать в виде
, уравнения кривой можно записать в виде

 .
.
В этих координатах имеем вектор скорости кривой
 .
.
В области действия двух координатных систем Up и Uq имеем две записи для уравнения кривой
и  ,
,
 .
.
Дифференцируя это равенство получаем
 .
.
На основании этой формулы вводится следующее определение.
Определение 1. Касательным вектором к многообразию M в произвольной точке x называется вектор, записываемый в системе локальных координат  набором чисел
набором чисел  , который при переходе к другой системе координат
, который при переходе к другой системе координат  преобразуется по закону
преобразуется по закону
 .
.
Касательные векторы к n-мерному многообразию M в данной точке x образуют n-мерное линейное пространство Tx = TxM — касательное пространство.
В частности, вектор скорости любой гладкой кривой является касательным вектором.
Выбор локальных координат  в окрестности точки x задает базис
в окрестности точки x задает базис  в касательном пространстве Tx .
в касательном пространстве Tx .
Гладкое отображение f многообразия M в многообразие N определяет индуцированное линейное отображение касательных пространств
При этом вектор скорости кривой x = x(t) на многообразии M переходит в вектор скорости кривой f(x(t)) на многообразии N.
В локальных координатах (x a ) в окрестности точки x и локальных координатах (y b ) в окрестности точки f(x) отображение f имеет вид
y b = f b (x 1 ,x 2 ,…,x n ), b = 1, 2, …, m ,
тогда индуцированное отображение f* касательных пространств задается матрицей Якоби:
 .
.
Векторное поле
Определение 1. Если в каждой точке x многообразия M определен вектор из соответствующего касательного пространства Tx, то говорят, что на многообразии задано векторное поле.
Для уточнения этого понятия отметим, что на множестве TM всех касательных пространств к многообразию M естественным образом вводится структура многообразия, картами которого служат прямые суммы карт многообразия M и касательных пространств к M в соответствующих точках многообразия M. Получаемое таким образом многообразие называется векторным расслоением многообразия M .Теперь векторное поле на многообразии M можно определить как отображение
такое, что y(x) Î TxM для каждого x Î M.
Определение 2. Векторное поле называется гладким (класса C ¥ ), если отображение y является гладким.
В локальных координатах многообразия TM векторное поле имеет вид
 . (2)
. (2)
Определение 3. Векторной линией называется такая линия многообразия, в каждой точке которой вектор поля касается этой линии. Векторные линии также называются орбитами и интегральными кривыми векторного поля.
В локальных координатах векторная линия описывается следующей системой дифференциальных уравнений:
 , i = 1,2,…,n ,
, i = 1,2,…,n ,
где  — координатное задание искомой линии, а
— координатное задание искомой линии, а  — координаты векторной части векторного поля. Граничным условием здесь является
— координаты векторной части векторного поля. Граничным условием здесь является  , где
, где  — координаты точки xo.
— координаты точки xo.
Пример 1. В трехмерном евклидовом пространстве рассмотрим векторное поле
X 1 = bx 3 – cx 2 , X 2 = cx 1 — ax 3 , X 3 = ax 2 — bx 1 .
Система дифференциальных уравнений для нахождения векторной линии принимает вид
Умножим эти уравнения на x i соответственно и, сложив, получим
x 1 dx 1 + x 2 dx 2 + x 3 dx 3 = 0 dt = 0. (3)
Аналогично, умножая эти уравнения на a, b и c и складывая получим
adx 1 + bdx 2 + cdx 3 = 0. (4)
Интегрируя уравнения (3) и (4) получаем следующую систему уравнений
 (5)
(5)
Из этой системы следует, что векторные линии рассматриваемого векторного поля получаются в результате пересечения всевозможных концентрических сфер с центрами в начале координат со всевозможными плоскостями перпендикулярными вектору (a,b,c), то есть, векторные линии данного векторного поля являются окружностями с центрами на прямой, проходящей через начало координат и имеющей направляющим вектором вектор (a,b,c) и лежащими в плоскостях перпендикулярных этой прямой.
Отметим, что рассмотренное векторное поле является полем скоростей точек твердого тела, вращающегося вокруг описанной выше прямой с постоянной угловой скоростью.
Кинематика материальной точки
Основные формулы кинематики материальной точки
Приведем основные формулы кинематики материальной точки. После чего дадим их вывод и изложение теории.
Радиус-вектор материальной точки M в прямоугольной системе координат Oxyz :
,
где – единичные векторы (орты) в направлении осей x, y, z .
Скорость точки:
;
;
;
Единичный вектор в направлении касательной к траектории точки:
.
Вектор можно выбрать двумя способами во взаимно противоположных направлениях. Обычно его выбирают в направлении увеличения дуговой координаты. Тогда, наряду с модулем скорости , вводят алгебраическую величину скорости . При , вектор скорости сонаправлен с . При – имеет противоположное с направление.
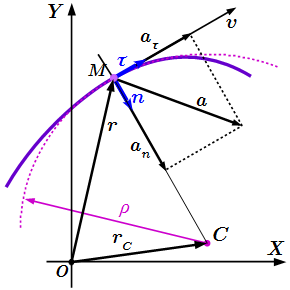
Скорость и ускорение точки M
Тангенциальное (касательное) ускорение:
;
;
.
Здесь, как и для скорости, – это алгебраическое касательное ускорение, . Если , то вектор касательного ускорения сонаправлен с . При – имеет противоположное с направление.
Единичный вектор, направленный к центру кривизны траектории точки (вдоль главной нормали):
.
Радиус кривизны траектории:
.
Далее приводится вывод этих формул и изложение теории кинематики материальной точки.
Радиус-вектор и траектория точки
Рассмотрим движение материальной точки M . Выберем неподвижную прямоугольную систему координат Oxyz с центром в некоторой неподвижной точке O . Тогда положение точки M однозначно определяются ее координатами ( x, y, z ) . Эти координаты являются компонентами радиус-вектора материальной точки.
Радиус-вектор точки M – это вектор , проведенный из начала неподвижной системы координат O в точку M .
,
где – единичные векторы в направлении осей x, y, z .
При движении точки, координаты изменяются со временем . То есть они являются функциями от времени . Тогда систему уравнений
(1)
можно рассматривать как уравнение кривой, заданной параметрическими уравнениями. Такая кривая является траекторией точки.
Траектория материальной точки – это линия, вдоль которой происходит движение точки.
Если движение точки происходит в плоскости, то можно выбрать оси и системы координат так, чтобы они лежали в этой плоскости. Тогда траектория определяется двумя уравнениями
В некоторых случаях, из этих уравнений можно исключить время . Тогда уравнение траектории будет иметь зависимость вида:
,
где – некоторая функция. Эта зависимость содержит только переменные и . Она не содержит параметр .
Скорость материальной точки
Согласно определению скорости и определению производной:
Производные по времени, в механике, обозначают точкой над символом. Подставим сюда выражение для радиус-вектора:
,
где мы явно обозначили зависимость координат от времени. Получаем:
,
где
,
,
– проекции скорости на оси координат. Они получаются дифференцированием по времени компонент радиус-вектора
.
Таким образом
.
Модуль скорости:
.
Касательная к траектории
С математической точки зрения, систему уравнений (1) можно рассматривать как уравнение линии (кривой), заданной параметрическими уравнениями. Время , при таком рассмотрении, играет роль параметра. Из курса математического анализа известно, что направляющий вектор для касательной к этой кривой имеет компоненты:
.
Но это есть компоненты вектора скорости точки. То есть скорость материальной точки направлена по касательной к траектории.
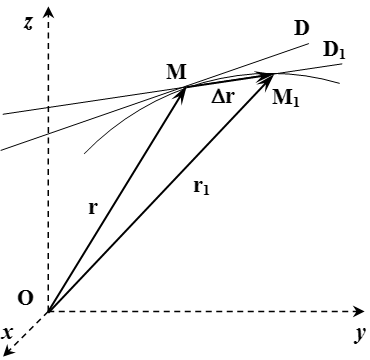
Все это можно продемонстрировать непосредственно. Пусть в момент времени точка находится в положении с радиус-вектором (см. рисунок). А в момент времени – в положении с радиус-вектором . Через точки и проведем прямую . По определению, касательная – это такая прямая , к которой стремится прямая при .
Введем обозначения:
;
;
.
Тогда вектор направлен вдоль прямой .
При стремлении , прямая стремится к касательной , а вектор – к скорости точки в момент времени :
.
Поскольку вектор направлен вдоль прямой , а прямая при , то вектор скорости направлен вдоль касательной .
То есть вектор скорости материальной точки направлен вдоль касательной к траектории.
Введем направляющий вектор касательной единичной длины:
.
Покажем, что длина этого вектора равна единице. Действительно, поскольку
, то:
.
Здесь мы направили вектор по направлению к вектору скорости, поскольку это более удобно. Но могут возникнуть случаи, когда точка останавливается и движется по той же траектории в обратном направлении. Чтобы не вводить для одной и той же точки траектории два единичных касательных вектора, нужно охватить случай, когда направлен противоположно скорости. Для этого вводят алгебраическую величину скорости:
.
Если направления векторов и совпадают, то . Если они противоположны, то .
– это проекция скорости на направление единичного вектора . Она равна скалярному произведению этих векторов:
.
Абсолютную величину (модуль) вектора скорости мы обозначаем символом с прямыми скобками, или символом без стрелки:
;
Алгебраическая величина скорости:
.
Тогда вектор скорости точки можно представить в следующем виде:
.
Ускорение материальной точки
Аналогично предыдущему, получаем компоненты ускорения (проекции ускорения на оси координат):
;
;
;
.
Модуль ускорения:
.
Тангенциальное (касательное) и нормальное ускорения
Теперь рассмотрим вопрос о направлении вектора ускорения по отношению к траектории. Для этого применим формулу:
.
Дифференцируем ее по времени, применяя правило дифференцирования произведения:
.
Вектор направлен по касательной к траектории. В какую сторону направлена его производная по времени ?
Чтобы ответить на этот вопрос, воспользуемся тем, что длина вектора постоянна и равна единице. Тогда квадрат его длины тоже равен единице:
.
Здесь и далее, два вектора в круглых скобках обозначают их скалярное произведение. Продифференцируем последнее уравнение по времени:
;
;
.
Поскольку скалярное произведение векторов и равно нулю, то эти векторы перпендикулярны друг другу. Так как вектор направлен по касательной к траектории, то вектор перпендикулярен к касательной.
Скорость, касательное и нормальное ускорение точки M
Первую компоненту называют тангенциальным или касательным ускорением:
.
Вторую компоненту называют нормальным ускорением:
.
Тогда полное ускорение:
(2) .
Эта формула представляет собой разложение ускорения на две взаимно перпендикулярные компоненты – касательную к траектории и перпендикулярную к ней.
Тангенциальное (касательное) ускорение
Также как и для скорости, введем алгебраическую величину вектора касательного ускорения :
.
Если , то вектор касательного ускорения сонаправлен с . Если , то эти векторы противоположны. Абсолютную величину касательного ускорения будем обозначать прямыми скобками: . Тогда
.
Умножим обе части уравнения (2) скалярно на :
.
Поскольку , то . Тогда
;
.
Здесь мы положили: .
Отсюда видно, что алгебраическая величина тангенциального ускорения равна проекции полного ускорения на направление касательной к траектории. Она также равна производной по времени алгебраической величины скорости точки: .
Подставив , имеем:
.
Здесь мы учли, что .
Найдем производную по времени модуля скорости . Применяем правила дифференцирования:
;
.
Итак,
.
Отсюда следует, что если между векторами ускорения и скорости острый угол: , то движение ускоренное. Абсолютное значение скорости возрастает. Если между ними тупой угол: , то движение замедленное. Абсолютное значение скорости убывает.
Выразим ускорение через тангенциальное и нормальное: , и учтем, что . Получим:
.
Тогда предыдущую формулировку можно выразить посредством тангенциального ускорения. Если векторы касательного ускорения и скорости направлены в одну сторону, то движение ускоренное. Если их направления противоположны, то движение замедленное.
Радиус кривизны траектории
Теперь исследуем вектор .
Рассмотрим вектор в два момента времени – в момент времени t и в момент t 1 . Введем обозначения: . По определению производной:
.
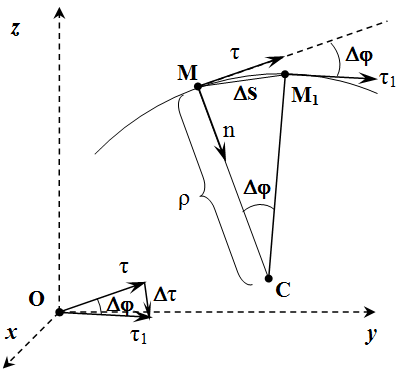
Пусть в момент времени t , точка находится в положении M , а в момент t 1 – в положении M 1 (см. рисунок).
Рассмотрим случай, когда алгебраическая скорость положительна: . То есть направления векторов и совпадают. Тогда точка M 1 находится справа от M . Через точки и проведем плоскости, перпендикулярные векторам и . Пересечение этих плоскостей образует прямую. Она проходит через точку C перпендикулярно плоскости рисунка. MC – это перпендикуляр, опущенный из точки M на эту прямую.
При , точка стремится к точке , а длина отрезка CM стремится к радиусу кривизны траектории ρ . Поскольку и , то угол между отрезками и равен углу между векторами и . Отложим их для наглядности из одного центра.
Абсолютное значение производной:
.
Здесь мы учли, что .
Вектор , как указывалось выше, перпендикулярен . В данном случае он направлен вдоль единичного вектора главной нормали , направленной к центру кривизны C траектории. Поэтому при имеем:
.
Теперь рассмотрим случай, когда алгебраическое значение скорости отрицательно: . В этом случае, вектор скорости противоположен . Получается тот же рисунок, только точка располагается слева от M . В результате абсолютное значение производной остается прежней:
.
Но ее направление меняется на противоположное:
.
Поскольку , то формула сохраняет прежний вид и в этом случае:
.
Нормальное ускорение
Теперь находим нормальное ускорение:
.
Перепишем результат в следующем виде:
,
где ; – единичный вектор в направлении главной нормали траектории – то есть вектор, направленный к мгновенному центру кривизны перпендикулярно касательной к траектории. Поскольку , то также является модулем нормального ускорения. Для него не нужно вводить алгебраическое значение, как мы это делали для скорости и касательного ускорения.
Нормальное ускорение всегда направлено к центру кривизны траектории.
Из формулы (2) имеем:
(4) .
Из формулы (3) находим модуль нормального ускорения:
.
Умножим обе части уравнения (2) скалярно на :
(2) .
.
Поскольку , то . Тогда
;
.
Отсюда видно, что модуль нормального ускорения равен проекции полного ускорения на направление главной нормали.
Выпишем еще раз следующую формулу:
.
Отсюда видно, что нормальное ускорение вызывает изменение направления скорости точки, и оно связано с радиусом кривизны траектории.
Радиус кривизны траектории:
.
И в заключении заметим, что формулу (4) можно переписать в следующем виде:
.
Здесь мы применили формулу для векторного произведения трех векторов:
,
в которую подставили
.
Итак, мы получили:
;
.
Приравняем модули левой и правой частей:
.
Но векторы и взаимно перпендикулярны. Поэтому
.
Тогда
.
Это известная формула из дифференциальной геометрии для кривизны кривой.
Автор: Олег Одинцов . Опубликовано: 09-02-2016 Изменено: 27-01-2020
http://helpiks.org/8-24441.html
http://1cov-edu.ru/mehanika/kinematika/tochki/
, ξ n и η 1 , . . . , η n соответственно, их линейной комбинацией aξ + bη считаетсявектор, задаваемый числами aξ i + bη i , i = 1, . . . , n.Задача 1. Доказать, что сумма векторов и произведение вектора на число не зависят отиспользованной системы координат.Задача 2. Определить сумму и произведение на число касательных векторов, понимаемыхкак классы касающихся кривых.Пусть в окрестности точки P задана система координат x1 , . . . , xn ; в касательномпространстве TP M рассмотрим базис e1 , . . . , en , состоящий из векторов, которые задаютсяв данной систем координат наборами чисел eij = δji .Определение 11. Этот базис называется каноническим базисом, соответствующим системекоординат x1 , . .
. , xn .Ясно, что базисный вектор ej — это вектор скорости к j–й координатной линии, т.е.кривой вида xi = xi0 , i 6= j, xj = xj0 + t, проходящей через точку P (здесь xi0 — координатыэтой точки). Числа, сопоставленные касательному вектору в данной системе координат —это его координаты в соответствующем каноническом базисе.
При замене координат канонический базис меняется; матрица перехода от одного канонического базиса к другому —это в точности матрица Якоби замены координат (докажите!); формула (1) — это законпреобразования координат вектора при замене базиса.Помимо двух описанных способов определения касательного вектора существует ещетретий способ — определить этот вектор при помощи операции дифференцирования вдольнего. Именно, рассмотрим всевозможные гладкие функции на M, определенные в некоторой окрестности точки P и пусть ξ ∈ TP M — касательный вектор. Рассмотрим произвольную проходящую через P кривую γ, для которой ξ является вектором скорости, иограничим гладкую функцию f на эту кривую, т.е.
рассмотрим гладкую функцию f ◦ γодной переменной t: f ◦ γ(t) = f (γ(t)), t ∈ [a, b]. Будем считать, что кривая γ проходитчерез точку P при t = t0 .Определение 12. Производной функции f вдоль касательного вектора ξ в точке P называется число:d ∂ξ (f ) = f (γ(t)).dt t=t0Утверждение 2. Приведенное определение корректно, т.е. не зависит от выбора кривой γ,представляющей касательный вектор ξ.94Доказательство.
В локальных координатах x1 , . . . , xn функция f — это обычная гладкая функция n переменных f (x1 , . . . , xn ). Кривая γ задается уравнениями xi = xi (t), акасательный вектор ξ — координатным набором чисел ξ 1, . . . , ξ n :ξi =Отсюда находим:dxi .dt t=t0nnXXd ∂fdxj ∂f1n∂ξ (f ) = f (x (t), . . .
, x (t)) =(P )(P )ξ j . =jjdt t=t0∂xdt t=t0 j =1 ∂xj =1Последнее выражение зависит только от функции f и вектора ξ.Таким образом каждый касательный вектор определяет отображение множествагладких функций, заданных в окрестности P , в числа (каждой функции сопоставляетсяее производная вдоль этого вектора), причем это отображение удовлетворяет очевиднымсвойствам:1. ∂ξ (af + bg) = a∂ξ (f ) + b∂ξ (f ),a, b ∈ R (линейность),2.
∂ξ (f g) = f (P )∂ξ (f ) + g(P )∂ξ (f ) (правило Лейбница).Определение 13. Отображение множества гладких функций на M в числа, удовлетворяющее условием 1), 2) называется дифференцированием множества функций на M вточке P .Ясно, что каждый касательный вектор из TP M определяет единственное дифференцирование. Оказывается, это соответствие взаимно–однозначно.Теорема 1. Для каждого дифференцирования A множества гладких функций на M вточке P найдется единственный вектор ξ ∈ TP M, для которого:A(f ) = ∂ξ (f ).Доказательство. Зафиксируем систему координат x1 , . . .
, xn в окрестности точки P и рассмотрим произвольную гладкую функцию f . Из формулы Тейлора следует, что в окрестности точки P эта функция представляется в виде:f = f (P ) +nnXX∂fjj(P)(x−x)+hj (x)(xj − xj0 ),0j∂xi =1i, j =1где xi0 — координаты точки P , а hj (x) — гладкие функции, причем hj (P ) = 0 (докажите!).Применим к этой функции отображение дифференцирования A; пользуясь линейностью,получим:nnXX∂fjjA(f ) = f (P )A(1) +(P )A(x − x0 ) + A(hj (x)(xj − xj0 )).j∂xj =1i, j =1Из правила Лейбница следует, что A(1) = A(1 • 1) = A(1) + A(1), откуда A(1) = 0; крометого, из того же правила следует, что:A(nXi, j =1hj (x)(xj − xj0 )) = 095(каждое слагаемое в этой сумме представлено в виде произведения двух функций, каждаяиз которых обращается в нуль в точке P ).
Обозначая ξ i = A(xi − xi0 ), получим:A(f ) =nX∂f(P )ξ j = ∂ξ (f ),j∂xi =1где ξ — касательный вектор, заданный в системе координат x1 , . . . , xn числами ξ 1 , . . . , ξ n .Докажем, что вектор ξ единственный. Действительно, из равенства ∂ξ (f ) = ∂η (f ) следует,что:nX∂f j(ξ − η j ) = 0,j∂xj =1которое должно быть выполнено для любой гладкой функции f .
Выбирая f = xk ,k = 1, . . . , n получим ξ k = η k , т.е. ξ = η.Таким образом, мы приходим к третьему определению касательного вектора.Определение 14. Касательным вектором в точке P к многообразию M называется дифференцирование множества гладких функций на M в точке P .Ясно, что при фиксированной системе координат x1 , . .
. , xn дифференцирование, соответствующее вектору ej канонического базиса — это дифференцирование по локальнойкоординате xj :∂f∂ej (f ) = j .∂xПоэтому для этого вектора часто используется обозначение ∂/∂xj ; таким образом, канонический базис, порожденный в касательном пространстве координатами x1 , .
. . , xn , состоитиз векторов:∂∂,…,,∂x1∂xnа каждый касательный вектор ξ имеет вид:ξ=nXξjj =196∂.∂xjЗадачи.1. Построить атлас:(a) на окружности;(b) на сфере;(c) на цилиндре(d) на торе.2. Доказать, что множество M, заданное в трехмерном пространстве уравнением F (x, y, z) = 0,причем ∇F |M 6= 0, является многообразием. Найти его размерность.3. Доказать, что множество M, заданное в n–мерном пространстве системой уравнений:F1 (x1 , . .
. , xn ) = 0, . . . , Fk (x1 , . . . , xn ) = 0,причем ранг матрицы Якоби ∂Fi /∂xj во всех точках M равен k, является многообразием. Найти его размерность.4. Доказать, что проективная прямая (множество прямых на плоскости, проходящихчерез начало координат) — многообразие. Найти его размерность.5.
Доказать, что проективная плоскость (множество прямых в трехмерном пространстве, проходящих через начало координат) — многообразие. Найти его размерность.6. Доказать, что следующие матричные группы являются многообразиями и найти ихразмерности:(a) SL(2,R) — 2 × 2-матрицы с определителем 1,(b) SO(2) — 2 × 2 ортогональные матрицы с определителем 1,(c) SU(2) — 2 × 2 унитарные матрицы с определителем 1,(d) SL(n,R) — n × n-матрицы с определителем 1,(e) T(n,R) — верхнетреугольные n × n-матрицы,(f) SO(3) — 3 × 3 ортогональные матрицы с определителем 1,λ 0(g)λ > 0, a > 0 − фиксировано.0 λa7. Доказать, что прямое произведение конечного числа многообразий — многообразие.Найти его размерность.8.
Найти касательные пространства к многообразиям из задач 2,3,6.9. Доказать, что следующие матричные группы являются многообразиями, найти ихразмерности и касательные пространства в единице:(a) SL(n,R),(b) SO(n),(c) SU(n).9710. Найти касательное пространство к группе SO(3) в точке:√1/23/20√A = − 3/2 1/2 0 .00111. Найти координату единичного вектора, касающегося окружности радиуса R точкеϕ = π/3 в системе координат “полярный угол” и в координате стереографическойпроекции.12. Найти координаты касательного вектора к образующей и параллели на конусе вкоординатах: (r, ϕ), (z, ϕ), (x, y).13. На цилиндре найти координаты вектора, касающегося винтовой линии с шагом d, вцилиндрических координатах (ϕ, z).√14.
На цилиндре найти координаты касательного вектора (−R 3, R, 1) в точке ϕ = π/3,z = 1 в цилиндрических координатах (ϕ, z) и в координатах стереографической проекции.√√√ √15. На сфере найти координаты касательного вектора (− 2, 2, 1) в точке (1/ 2, 1/ 2, 0)в сферических координатах и в координатах стереографической проекции.16. То же для вектора, касающегося:(a) меридиана;(b) параллели;(c) большого круга, лежащего в плоскости x + 3y − 2z = 0.17. На проективной плоскости (множестве прямых в R3 ) найти координаты в аффинныхкартах касательного вектора в точке t = π/4 к кривой r = (cos t, sin t, t).18.
Доказать, что для всякого многообразия M его касательное и кокасательное расслоения являются многообразиями. Найти их размерность. Поясним, что касательноерасслоение к многообразию M — это множество пар вида (P, ξ), где P — точка многообразия M, а ξ — касательный вектор к M в этой точке; кокасательное расслоениеобразовано парами (P, α), где α — линейный функционал на касательном пространстве TP M.9814 Лекция 14. Вложения и погружения многообразий§ 1. Дифференциал гладкого отображения.Выше мы видели, что гладкое отображение поверхностей индуцирует отображениекасательных векторов к ним: вектор скорости некоторой кривой на первой поверхности переходит в вектор скорости образа этой кривой (в соответствующей точке) на второй поверхности.
Точно так же обстоит дело и в случае произвольных многообразий.Именно, пусть M, Q — гладкие многообразия размерностей n, m соответственно, и пустьf : M → Q — гладкое отображение. Рассмотрим произвольный касательный вектор ξ кмногообразию M в точке P . Это — класс касающихся в точке P гладких кривых на M;пусть γ — одна из кривых (представитель) этого класса.
Отображение f переводит этукривую в гладкую кривую f (γ), лежащую на многообразии Q и проходящую через точкуf (P ); обозначим через dP f (ξ) вектор скорости кривой f (γ) в этой точке.Теорема 1. Вектор dP f (ξ) не зависит от выбора кривой γ из класса, определяющеговектор ξ; таким образом, описанная конструкция корректно определяет отображениеdP f : TP M → Tf (P ) Q.
From Wikipedia, the free encyclopedia
For a more general, but more technical, treatment of tangent vectors, see Tangent space.
In mathematics, a tangent vector is a vector that is tangent to a curve or surface at a given point. Tangent vectors are described in the differential geometry of curves in the context of curves in Rn. More generally, tangent vectors are elements of a tangent space of a differentiable manifold. Tangent vectors can also be described in terms of germs. Formally, a tangent vector at the point  is a linear derivation of the algebra defined by the set of germs at .
is a linear derivation of the algebra defined by the set of germs at .
Motivation[edit]
Before proceeding to a general definition of the tangent vector, we discuss its use in calculus and its tensor properties.
Calculus[edit]
Let  be a parametric smooth curve. The tangent vector is given by
be a parametric smooth curve. The tangent vector is given by  , where we have used a prime instead of the usual dot to indicate differentiation with respect to parameter t.[1] The unit tangent vector is given by
, where we have used a prime instead of the usual dot to indicate differentiation with respect to parameter t.[1] The unit tangent vector is given by

Example[edit]
Given the curve

in  , the unit tangent vector at
, the unit tangent vector at  is given by
is given by

Contravariance[edit]
If is given parametrically in the n-dimensional coordinate system xi (here we have used superscripts as an index instead of the usual subscript) by  or
or

then the tangent vector field  is given by
is given by

Under a change of coordinates

the tangent vector  in the ui-coordinate system is given by
in the ui-coordinate system is given by

where we have used the Einstein summation convention. Therefore, a tangent vector of a smooth curve will transform as a contravariant tensor of order one under a change of coordinates.[2]
Definition[edit]
Let  be a differentiable function and let
be a differentiable function and let  be a vector in
be a vector in  . We define the directional derivative in the direction at a point
. We define the directional derivative in the direction at a point  by
by

The tangent vector at the point  may then be defined[3] as
may then be defined[3] as

Properties[edit]
Let  be differentiable functions, let
be differentiable functions, let  be tangent vectors in at , and let
be tangent vectors in at , and let  . Then
. Then



Tangent vector on manifolds[edit]
Let  be a differentiable manifold and let
be a differentiable manifold and let  be the algebra of real-valued differentiable functions on . Then the tangent vector to at a point in the manifold is given by the derivation
be the algebra of real-valued differentiable functions on . Then the tangent vector to at a point in the manifold is given by the derivation  which shall be linear — i.e., for any
which shall be linear — i.e., for any  and we have
and we have

Note that the derivation will by definition have the Leibniz property

See also[edit]
- Differentiable curve § Tangent vector
- Differentiable surface § Tangent plane and normal vector
References[edit]
- ^ J. Stewart (2001)
- ^ D. Kay (1988)
- ^ A. Gray (1993)
Bibliography[edit]
- Gray, Alfred (1993), Modern Differential Geometry of Curves and Surfaces, Boca Raton: CRC Press.
- Stewart, James (2001), Calculus: Concepts and Contexts, Australia: Thomson/Brooks/Cole.
- Kay, David (1988), Schaums Outline of Theory and Problems of Tensor Calculus, New York: McGraw-Hill.
Для более общей, но более технической обработки касательных векторов см. Касательное пространство .
В математике , А касательный вектор представляет собой вектор , который является касательной к кривой или поверхности в данной точке. Касательные векторы описываются в дифференциальной геометрии кривых в контексте кривых в R n . В более общем смысле , касательные векторы являются элементами касательного пространства в виде дифференцируемого многообразия . Касательные векторы также можно описать в терминах ростков . Формально касательный вектор в точке является линейным производным алгебры, определяемой множеством ростков в точке .
Мотивация
Прежде чем перейти к общему определению касательного вектора, мы обсудим его использование в исчислении и его тензорные свойства.
Исчисление
Позвольте быть параметрической гладкой кривой . Касательный вектор задается как , где мы использовали штрих вместо обычной точки для обозначения дифференцирования по параметру t . Единичный касательный вектор задается формулой


Пример
Учитывая кривую

в единичный касательный вектор в задается формулой

Контравариантность
Если задано параметрически в n -мерной системе координат x i (здесь мы использовали верхние индексы в качестве индекса вместо обычного нижнего индекса) посредством или
то касательное векторное поле задается формулой
При смене координат
касательный вектор в u i -системе координат задается формулой
где мы использовали соглашение Эйнштейна о суммировании . Следовательно, касательный вектор гладкой кривой при изменении координат преобразуется в контравариантный тензор первого порядка.
Определение
Позвольте быть дифференцируемой функцией и пусть быть вектором в . Определим производную по направлению в точке как


Касательный вектор в точке может быть определен как

Характеристики
Позвольте быть дифференцируемыми функциями, пусть быть касательными векторами в at , и пусть . потом
Касательный вектор на многообразиях
Пусть — дифференцируемое многообразие и пусть — алгебра вещественнозначных дифференцируемых функций на . Тогда касательный вектор к в точке на многообразии задается дифференцированием, которое должно быть линейным, т. Е. Для любого, и мы имеем
Обратите внимание, что вывод по определению будет обладать свойством Лейбница
Смотрите также
- Дифференцируемая поверхность # Касательная плоскость и вектор нормали
использованная литература
- ^ Дж. Стюарт (2001)
- ↑ Д. Кей (1988)
- ↑ А. Грей (1993)
Библиография
-
Грей, Альфред (1993), Современная дифференциальная геометрия кривых и поверхностей , Бока-Ратон: CRC Press.
- Стюарт, Джеймс (2001), Исчисление: концепции и контексты , Австралия: Томсон / Брукс / Коул.
- Кей, Дэвид (1988), Обзор теории и проблем тензорного исчисления Шаумсом , Нью-Йорк: МакГроу-Хилл.