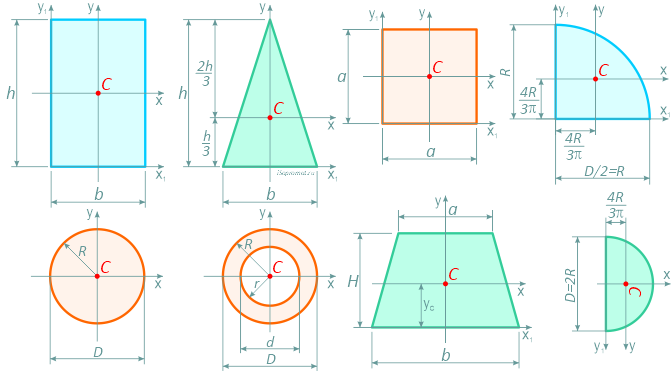

Формулы площадей, центров тяжести, осевых и полярных моментов инерции, моментов сопротивления и других геометрических характеристик основных простых фигур: прямоугольника, квадрата, равнобедренного и прямоугольного треугольника, круга, полукруга, четверти круга, кольцевого и тонкостенного сечений.
Обозначения в формулах:
C — положение центра тяжести фигуры;
A — площадь сечения;
Ix , Iy — осевые моменты инерции сечения относительно главных осей;
Ix1 , Iy1 — осевые моменты инерции относительно вспомогательных (смещённых) осей;
Iρ — полярный момент инерции сечения;
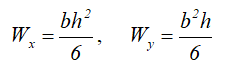
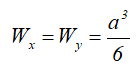
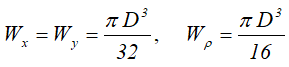
Wx , Wy — осевые моменты сопротивления;
Wρ — полярный момент сопротивления
Прямоугольник
Прямоугольник высотой h и шириной b.
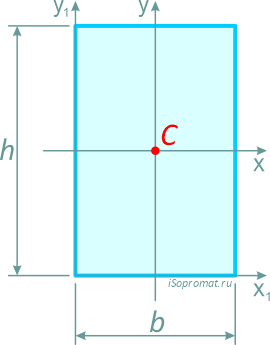
Центр тяжести прямоугольника в точке пересечения его диагоналей, на расстоянии половины высоты (h/2) по вертикали и половины ширины (b/2) по горизонтали.
Площадь
![]()
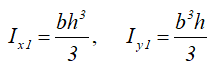
Центральные осевые моменты инерции прямоугольника
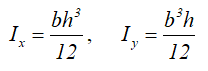
Моменты инерции относительно смещенных осей, проходящих через нижнюю левую точку
Осевые моменты сопротивления прямоугольного сечения
Квадрат
Квадрат — это частный случай прямоугольника, у которого высота равна ширине, т.е. h=b=a.
Центр тяжести квадрата находится так же на пересечении диагоналей — на расстоянии половины стороны (a/2) по высоте и ширине.
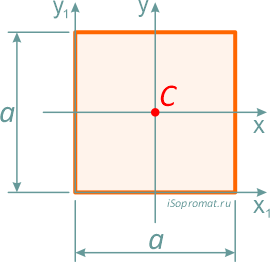
Площадь
![]()
Центральные осевые моменты инерции квадрата
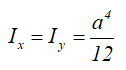
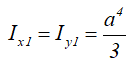
Моменты инерции относительно смещенных осей, проходящих через нижнюю левую точку
Осевой момент сопротивления квадратного сечения
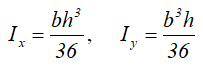
Треугольник равнобедренный
Равнобедренный треугольник высотой h и шириной основания b.
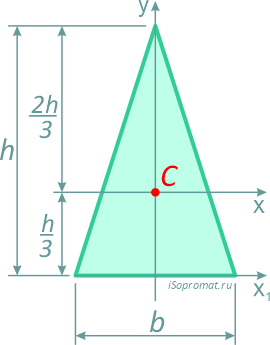
Центр тяжести треугольника располагается в точке пересечения его медиан на расстоянии 1/3 высоты от основания и 2/3 высоты от его вершин.
Площадь

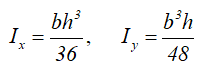
Центральные осевые моменты инерции треугольника
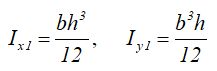
Момент инерции относительно смещенной оси x1, проходящей через его основание

Прямоугольный треугольник
Прямоугольный треугольник высотой h и шириной основания b.
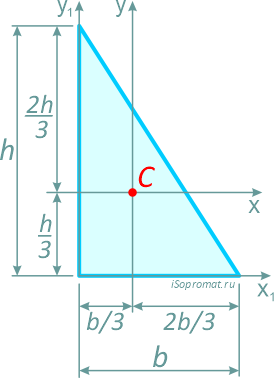
Центр тяжести прямоугольного треугольника располагается аналогично, на пересечении медиан на расстоянии 1/3 высоты от основания и 2/3 высоты от вершины.
Площадь

Центральные осевые моменты инерции прямоугольного треугольника
Моменты инерции относительно смещенных осей x1 и y1, проходящих через точку, соединяющую его катеты
Трапеция
Равнобокая трапеция высотой H и шириной оснований: малого a и большого b.
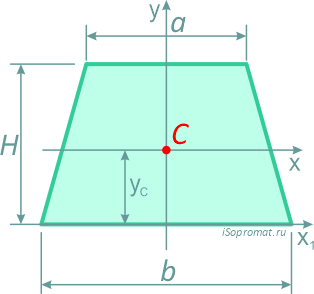
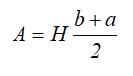
Площадь трапеции
Центр тяжести на линии, соединяющей середины оснований трапеции, на высоте, определяемой по формуле:
Круг
Круг диаметром D (d) или радиусом R (r)
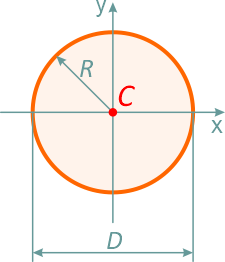
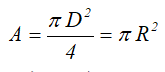
Площадь круга через его диаметр и радиус
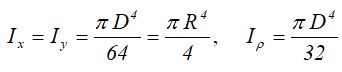
Центральные осевые и полярный моменты инерции круга
Осевые и полярный моменты сопротивления
Полукруг
Половина круга диаметром D (d) или радиусом R (r)
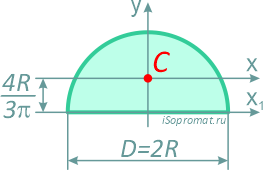
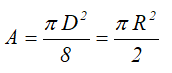
Площадь
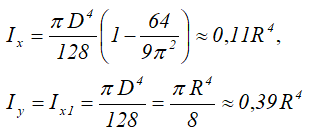
Осевые моменты инерции полукруга
Четверть круга
Четверть круга диаметром D (d) или радиусом R (r)
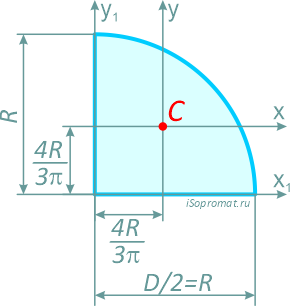
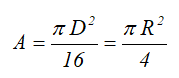
Площадь
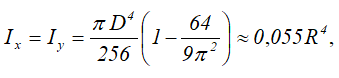
Центральные осевые моменты инерции четверти круга
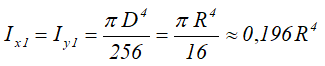
Моменты инерции относительно смещенных осей x1 и y1
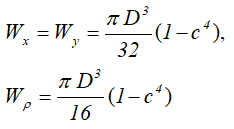
Кольцо
Кольцо с внешним диаметром D и внутренним d, (радиусами: внешним R и внутренним r)
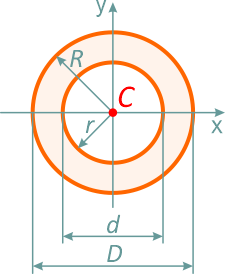
Отношение внутреннего диаметра (радиуса) к внешнему обозначается буквой c.
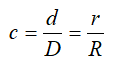
Площадь
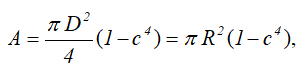
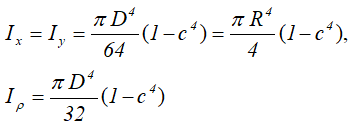
Центральные осевые и полярный моменты инерции кольца
Осевые и полярный моменты сопротивления
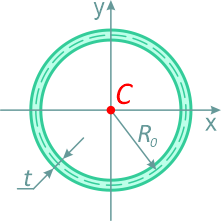
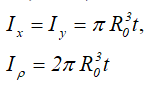
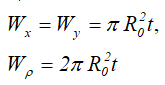
Тонкостенное сечение (труба)
Тонкостенный профиль (сечение трубы) средним радиусом R0 и толщиной стенки трубы t при R0>>t
Площадь
![]()
Центральные осевые и полярный моменты инерции трубного сечения
Осевые и полярный моменты сопротивления
Пример определения координат центра тяжести сложной фигуры:
Другие видео
Смотрите также:
Определение координат центра тяжести сложных фигур
Геометрические характеристики сечений
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее
§1. Центр тяжести однородного тела.
Рассмотрим твердое тело весом P и объемом V в системе координат Oxyz , где оси x и y связаны с поверхностью земли, а ось z направлена в зенит.
Если разбить тело на элементарные части объемом ∆Vi , то на каждую его часть будет действовать сила притяжения ∆Pi, направленная к центру Земли. Предположим, что размеры тела значительно меньше размеров Земли, тогда систему сил, приложенных к элементарным частям тела можно считать не сходящейся, а параллельной (рис.1), и к ней применимы все выводы предыдущей главы.
Рис.1. Параллельная система сил
Центром тяжести твердого тела называется центр параллельных сил тяжести элементарных частей этого тела.
При определении центра тяжести полезны несколько теорем.
1) Если однородное тело имеет плоскость симметрии, то центр тяжести его находится в этой
плоскости.
2) Если однородное тело имеет ось симметрии, то центр тяжести тела находится на этой оси.
3) Если однородное тело имеет центр симметрии, то центр тяжести тела находится в этой точке.
§2. Способы определения координат центра тяжести.
1. Симметрия. Если однородное тело имеет плоскость, ось или центр симметрии (рис.2), то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.


Рис.2. Центр тяжести тел, имеющих ось симметрии
2. Разбиение. Тело разбивается на конечное число частей (рис.3), для каждой из которых положение центра тяжести и площадь известны.

Рис.3. Центр тяжести сплошной
сложной геометрической фигуры
— центр тяжести и площадь первой фигуры;
— центр тяжести и площадь второй фигуры;
— координата центра тяжести сплошной сложной геометрической фигуры по оси x;
— координата центра тяжести сплошной сложной геометрической фигуры по оси y;
3. Метод отрицательных площадей. Частный случай способа разбиения (рис.4). Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Тело в виде пластинки с вырезом представляют комбинацией сплошной пластинки (без выреза) с площадью S1 и площади вырезанной части S2 .





Рис.4. Центр тяжести сложной геометрической фигуры,
имеющей отверстие
— центр тяжести и площадь первой фигуры;
— центр тяжести и площадь второй фигуры;
— координата центра тяжести сложной геометрической фигуры по оси x;
— координата центра тяжести сложной геометрической фигуры по оси y;
§3. Координаты центра тяжести некоторых простых фигур.
1. Центр тяжести треугольника. Центр тяжести треугольника лежит в точке пересечения его медиан (рис.5). Координаты центра тяжести треугольника представляют собой среднее арифметическое из координат его вершин: xc =1/3(x1+x2+x3) ; yc =1/3(y1+y2+y3).





Рис.5. Центр тяжести треугольника
2. Центр тяжести прямоугольника. Центр тяжести прямоугольника лежит в точке пересечения его диагоналей (рис.6). Координаты центра тяжести прямоугольника рассчитываются по формулам: xc =b/2 ; yc =h/2.

Рис. 6. Центр тяжести треугольника
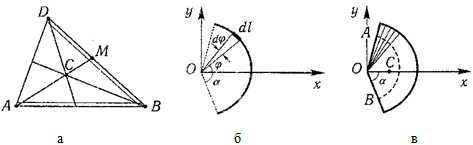
3. Центр тяжести полукруга. Центр тяжести полукруга лежит на оси симметрии (рис.7). Координаты центра тяжести полукруга рассчитываются по формулам: xc =D/2 ; yc =4R/3π.

Рис. 7. Центр тяжести полукруга
4. Центр тяжести круга. Центр тяжести круга лежит в центре (рис.8). Координаты центра тяжести круга рассчитываются по формулам: xc =R ; yc =R.

Рис. 8. Центр тяжести круга
Вопросы для самопроверки:
— Что называется центром параллельных сил?
— Что называется центром тяжести тела?
— Почему силы притяжения Земле, действующие на точку тела, можно принять за систему параллельных сил?
— Запишите формулу для определения положения центра тяжести неоднородных и однородных тел, формулу для определения положения центра тяжести плоских сечений?
— Запишите формулу для определения положения центра тяжести простых геометрических фигур: прямоугольника, квадрата, трапеции и половины круга?
— Как используются свойства симметрии при определении центров тяжести тел?
— В чем состоит сущность способа отрицательных площадей?
— Каким графическим построением можно найти центр тяжести треугольника?
— Запишите формулу, определяющую центр тяжести треугольника.
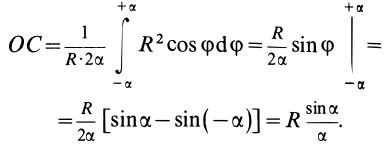
Центр
тяжести дуги окружности 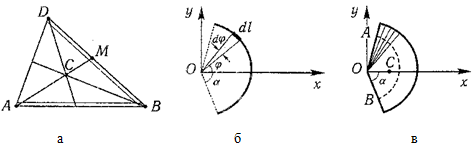
Дуга
имеет ось симметрии. Центр тяжести лежит
на этой оси, т.е. yC =
0.
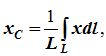
dl –
элемент дуги, dl = Rdφ,
R –
радиус окружности, x
= Rcosφ, L
= 2αR,

Следовательно:
xC =
R(sinα/α).
Центр
тяжести кругового сектора
Сектор
радиуса R с
центральным углом 2α имеет
ось симметрии Ox,
на которой находится центр тяжести.
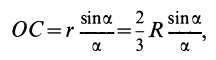
Разбиваем
сектор на элементарные секторы, которые
можно считать треугольниками. Центры
тяжести элементарных секторов
располагаются на дуге окружности радиуса
(2/3)R.
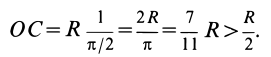
Центр
тяжести сектора совпадает с центром
тяжести дуги AB:

Полукруг:
![]()
37. Кинематика. Кинематика точки. Способы задания движения точки.
Кинематика –
раздел механики, в котором изучаются
движение материальных тел с геометрической
точки зрения, без учета массы и действующих
на них сил. Способы задания движения
точки: 1) естественный, 2) координатный,
3) векторный.
Кинема́тика
точки —
раздел кинематики,
изучающий математическое описание движения
материпльных точек.
Основной задачей кинематики является
описание движения при помощи математического
аппарата без выяснения причин, вызывающих
это движение.
Естественный
сп.
указывается траектория точки, закон ее
движения по этой траектории, начало и
направление отсчета дуговой
координаты: s=f(t)
– закон
движения точки. При прямолинейном
движении: х=f(t).
Координатный
сп.
положение точки в пространстве
определяется тремя координатами, изменения
которых определяют закон движения
точки: x=f1(t),
y=f2(t),
z=f3(t).
Если
движение в плоскости, то два уравнения
движения. Уравнения движения описывают
уравнение траектории в параметрической
форме. Исключив из уравнений параметр t,
получаем уравнение траектории в обычном
виде:f(x,y)=0 (для
плоск-ти).
Векторный
сп.
положение точки определяется ее
радиус-вектором , проведенным из
какого-либо центра. Кривая, которая
вычерчивается концом какого-либо
вектора, назыв. годографом этого
вектора. Т.е. траектория – годограф
радиус-вектора.
38.Связь между координатным и векторным, координатным и естественным способами задания движения точки.
СВЯЗЬ
ВЕКТОРНОГО СПОСОБА С КООРДИНАТНЫМ И
ЕСТЕСТВЕННЫМ выражается
соотношениями:
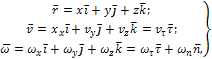
где ![]() —
—
орт касательной к траектории в данной
точке, направленный в сторону отсчета
расстояний, ![]() —
—
орт нормали к траектории в данной точке,
направленный в сторону центра кривизны
(см. рис. 3).
СВЯЗЬ
КООРДИНАТНОГО СПОСОБА С ЕСТЕСТВЕННЫМ.
Уравнение траектории f(x, y)=z; f1(x,
z)=y получается из уравнений движения в
координатной форме посредством исключения
времени t. Дополнительным анализом
значений, которые могут принимать
координаты точки, определяется тот
участок кривой  ,
,
который является траекторией. Например,
если движение точки задано уравнениями:
x=sin t; y=sin2t=x2,
то траекторией точки является тот
участок параболы у=х2,
для которого -1≤x≤+1, 0≤x≤1. Начало и
направление отсчета расстояний выбираются
произвольно, этим в дальнейшем определяется
знак скорости и величина и знак начального
расстояния s0.
Закон движения
определяется зависимостью:

знак + или —
определяется в зависимости от принятого
направления отсчета расстояний.
39
Скорость
точки –
это кинематическая мера ее движения,
равная производной по времени от
радиус-вектора этой точки в рассматриваемой
системе отсчета. Вектор скорости
направлен по касательной к траектории
точки в сторону движения
Вектор
скорости (v) —
это расстояние, которое тело проходит
в определенном направлении за единицу
времени. Обратите внимание, что
определение вектора
скорости очень
похоже на определение скорости, за
исключением одного важного различия:
скорость тела не указывает направление
движения, а вектор скорости тела указывает
и скорость, и направление движения.
Следовательно, необходимы две переменные,
которые описывают вектор скорости тела:
скорость и направление. Физические
величины, у которых есть значение и
направление, называют векторными
величинами.
Вектор
скорости тела
может время от времени изменяться. Если
или его скорость, или направление
изменяются, скорость тела также меняется.
Постоянный вектор скорости подразумевает
неизменную скорость и неизменное
направление, тогда как термин «постоянная
скорость» подразумевает только неизменное
значение, не принимая во внимание
направление. Термин «вектор скорости»
часто используется попеременно с
термином «скорость». Они оба выражают
расстояние, которое тело проходит в
единицу времени
40
Ускорение
точки –
это мера изменения ее скорости, равная
производной по времени от скорости этой
точки или второй производной от
радиус-вектора точки по времени. Ускорение
характеризует изменение вектора скорости
по величине и направлению и направлено
в сторону вогнутости траектории.
Вектор ускорения
это отношение
изменения скорости к промежутку времени,
за который это изменении произошло.
Определить среднее ускорение можно
формулой:
![]()
где ![]() – вектор
– вектор
ускорения.
Направление
вектора ускорения совпадает с направлением
изменения скорости Δ![]() =
= ![]() —
— ![]() 0 (здесь
0 (здесь ![]() 0 –
0 –
это начальная скорость, то есть скорость,
с которой тело начало ускоряться).
В
момент времени t1 (см. рис 1.8) тело имеет
скорость ![]() 0.
0.
В момент времени t2 тело имеет скорость ![]() .
.
Согласно правилу вычитания векторов
найдём вектор изменения скорости
Δ![]() =
= ![]() —
— ![]() 0.
0.
Тогда определить ускорение можно так:
![]()
41
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
На этой странице представлена справочная информация с формулами для вычисления площадей простых фигур (сечений) с указанием положения их центров тяжестей.
Эта страничка будет полезна при расчёте более сложных фигур (составных поперечных сечений): определении положения центра тяжести, а также общей площади.
Центры тяжести
Для всех фигур, положение центра тяжести в статье обозначается буквой – C, это наиболее используемый вариант. Также иногда центр тяжести обозначают буквой – O.
Формулы для расчёта площадей
В сопромате площадь поперечного сечения обозначается буквой – A, однако, в некоторой литературе ты можешь встретить обозначения с буквой – F.
Другую справочную информацию, размещённую на сайте – ssopromat.ru, можешь найти, перейдя по указанной ссылке.
Содержание:
Центр тяжести:
При рассмотрении движения тел, особенно таких, как самолеты, ракеты, космические корабли, важное значение имеет понятие центра тяжести.
Определения и формулы для вычисления центров тяжести
Для введения понятия центра тяжести разобьем мысленно рассматриваемое тело на достаточно большое число малых по сравнению с телом или элементарных его частей произвольной формы. Силу тяжести элементарной частицы тела с индексом 
Радиус-вектор центра тяжести тела  вычисляем как радиус-вектор центра параллельных сил (рис. 88) по формуле
вычисляем как радиус-вектор центра параллельных сил (рис. 88) по формуле
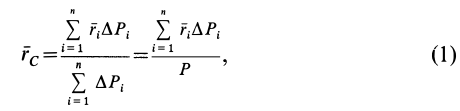
где  — радиус-вектор точки приложения силы тяжести элементарной части тела, принятой за точку;
— радиус-вектор точки приложения силы тяжести элементарной части тела, принятой за точку;  — сила тяжести элементарной частицы;
— сила тяжести элементарной частицы; 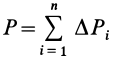 — сила тяжести всего тела;
— сила тяжести всего тела;  — число частей, на которое мысленно разбито все тело. Центр тяжести является точкой приложения равнодействующей силы тяжести, если силы тяжести отдельных его частей считать системой параллельных сил.
— число частей, на которое мысленно разбито все тело. Центр тяжести является точкой приложения равнодействующей силы тяжести, если силы тяжести отдельных его частей считать системой параллельных сил.
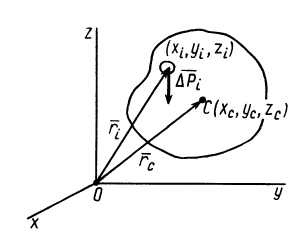
Рис. 88
Если в (1) перейти к пределу, увеличивая число элементарных частей до бесконечности, то после замены дифференциалом  , а суммы — интегралом получим
, а суммы — интегралом получим

где  — радиус-вектор элементарной части тела, принятой за точку. В проекциях на оси координат из (1) и (1′) получаем:
— радиус-вектор элементарной части тела, принятой за точку. В проекциях на оси координат из (1) и (1′) получаем:
где  — координаты центра тяжести;
— координаты центра тяжести;  — координаты точки приложения силы тяжести
— координаты точки приложения силы тяжести  .
.
Используя понятие центра тяжести тела, введем понятие его центра масс. Силы тяжести элементарных частей тела и всего тела можно выразить через их массы  и
и  и ускорение силы тяжести
и ускорение силы тяжести  с помощью формул
с помощью формул

Подставляя эти значения сил тяжести в (1) и (1′) после сокращения на , которое принимаем одинаковым для всех частей тела, имеем

и соответственно

По формулам (2) и (2′) определяют радиус-вектор центра масс тела. Центр масс обычно определяют независимо от центра тяжести как геометрическую точку, радиус-вектор, которой вычисляется по формулам (2) или (2′). В проекциях на оси координат из (2) и (2′) получаем:

и

где  — координаты центра масс тела.
— координаты центра масс тела.
Для однородного тела силу тяжести элементарной частицы тела и ее массу можно вычислить по формулам

где  — объем элементарной частицы тела;
— объем элементарной частицы тела;  и
и  — соответственно удельный вес и плотность тела. Сила тяжести и масса всего тела
— соответственно удельный вес и плотность тела. Сила тяжести и масса всего тела

где  — объем тела. Подставляя эти значения в (2) и (2′), после сокращения на и соответственно получим формулы
— объем тела. Подставляя эти значения в (2) и (2′), после сокращения на и соответственно получим формулы
по которым определяют центр тяжести объема тела.
Если тело имеет форму поверхности, т. е. один из размеров мал по сравнению с двумя другими, как, например, у тонкого листа железа, то имеем

где  — удельный вес;
— удельный вес;  — площадь элементарной частицы поверхности;
— площадь элементарной частицы поверхности;  — площадь всей поверхности. После сокращения на
— площадь всей поверхности. После сокращения на  для однородной поверхности получим следующие формулы для определения центра тяжести ее площади:
для однородной поверхности получим следующие формулы для определения центра тяжести ее площади:
Для однородных тел типа проволоки, у которых два размера малы по сравнению с третьим, можно определить радиус-вектор центра тяжести длины линии по формулам
где  — длина элемента линии;
— длина элемента линии;  —общая длина линии, центр тяжести которой определяется.
—общая длина линии, центр тяжести которой определяется.
Методы определения центров тяжести (Центров масс)
Метод симметрии
При определении центров тяжести широко используется симметрия тел. Докажем, что для однородного тела, имеющего плоскость симметрии, центр тяжести находится в плоскости симметрии. Для доказательства выберем начало координат в плоскости симметрии тела и одну из осей координат, ось  направим перпендикулярно плоскости симметрии, а две других оси расположатся в плоскости симметрии (рис. 89). Каждая частица массой
направим перпендикулярно плоскости симметрии, а две других оси расположатся в плоскости симметрии (рис. 89). Каждая частица массой  , находясь по одну сторону плоскости симметрии, имеет симметричную частицу такой же массы по другую сторону этой плоскости. Координаты
, находясь по одну сторону плоскости симметрии, имеет симметричную частицу такой же массы по другую сторону этой плоскости. Координаты  у симметричных частиц одинаковы при сделанном выборе осей координат, а координаты по оси
у симметричных частиц одинаковы при сделанном выборе осей координат, а координаты по оси  отличаются только знаком. Для координаты центра масс
отличаются только знаком. Для координаты центра масс  имеем следующее выражение:
имеем следующее выражение:
Разбивая сумму в числителе на две по симметричным частям тела, получаем, что
так как симметричные части тела 1 и 2 одинаковы.
Таким образом, центр масс расположен в плоскости симметрии и для его определения достаточно вычислить только две его координаты  и
и  в этой плоскости.
в этой плоскости.
Аналогично доказывается, что для однородного тела, имеющего ось или центр симметрии, центр масс находится соответственно на оси симметрии или в центре симметрии.
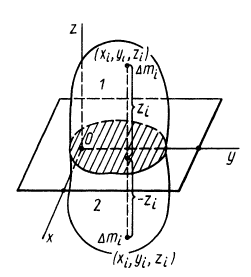
Рис. 89
Метод разбиения на части (метод группировки)
Некоторые тела сложной формы можно разбить на части, центры тяжести которых известны или предварительно могут быть определены. В таких случаях центры тяжести сложных тел вычисляются по общим формулам, определяющим центр тяжести, только вместо элементарных частиц тела берутся его конечные части, на которые оно разбито. Покажем это на частном примере плоской фигуры, изображенной на рис. 90. Плоскую фигуру можно разбить на три части, центры тяжести которых  ,
,  и
и  известны. Они находятся на пересечении диагоналей прямоугольников. Их радиусы-векторы обозначим
известны. Они находятся на пересечении диагоналей прямоугольников. Их радиусы-векторы обозначим  и площади
и площади 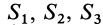 . Общая площадь сложной фигуры будет
. Общая площадь сложной фигуры будет  .
.
Используя определение центра тяжести и производя группировку слагаемых под знаком суммы по частям фигуры, на которые она разбита, получим

Радиусы-векторы центров тяжести частей тела выразятся в такой форме:

или

Используя эти формулы для радиуса-вектора всей фигуры, имеем

Полученная формула имеет ту же структуру, что и формула, определяющая радиус-вектор центра тяжести тела при разбиении его на элементарные частицы, только в нее входят величины для конечных частей тела.
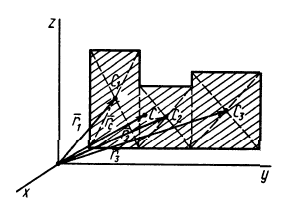
Рис. 90
Метод отрицательных масс
Видоизменением метода разбиения на части является метод отрицательных масс. Проиллюстрируем его тоже на примере плоской фигуры (рис. 91). Для определения центра тяжести этой фигуры ее можно разбить на три части. Можно поступить по-другому. Для этого дополним нашу фигуру до прямоугольника и примем, что этот прямоугольник с площадью  и центром масс
и центром масс  полностью заполнен массой (имеет положительную площадь). На той части фигуры, которую добавили, следует распределить отрицательную массу (отрицательную площадь) той же плотности. Площадь этой фигуры с отрицательной массой обозначим
полностью заполнен массой (имеет положительную площадь). На той части фигуры, которую добавили, следует распределить отрицательную массу (отрицательную площадь) той же плотности. Площадь этой фигуры с отрицательной массой обозначим  , а ее центр масс —
, а ее центр масс —  . Применяя метод разбиения на части, радиус-вектор заданной фигуры определим по формуле
. Применяя метод разбиения на части, радиус-вектор заданной фигуры определим по формуле

В отличие от обычного метода разбиения на части в формуле (4) массы и, следовательно, площади входят со знаком минус.
Метод отрицательных масс особенно удобен при вычислении положения центров тяжести тел, имеющих отверстия.
Рис. 91
Центры тяжести простейших тел
Для определения центров тяжести тел сложной формы методом разбиения на части или методом отрицательных масс необходимо уметь вычислять центры тяжести простейших тел, на которые разбивается тело сложной формы. Рассмотрим некоторые из тел, для определения центров тяжести которых известны простые способы их нахождения или вычисления по формулам.
Прямолинейный отрезок
Центр тяжести прямолинейного однородного отрезка располагается на его середине, а неоднородного— на самом отрезке и не может находиться вне отрезка.
Площадь треугольника
Для определения центра тяжести площади треугольника разобьем его прямыми линиями, параллельными одной из его сторон  , на полоски, которые в пределе можно принять за прямолинейные отрезки (рис. 92). Центры тяжести отрезков и, следовательно, полосок находятся посередине полоски. Все они расположатся на медиане
, на полоски, которые в пределе можно принять за прямолинейные отрезки (рис. 92). Центры тяжести отрезков и, следовательно, полосок находятся посередине полоски. Все они расположатся на медиане  . В пределе центры тяжести полосок непрерывно покроют медиану, но не равномерно, так как площади полосок разные. В каждом центре масс полоски следует считать сосредоточенной массу или площадь этой полоски, пропорциональную длине полоски, если ширину полосок выбирать одинаковой.
. В пределе центры тяжести полосок непрерывно покроют медиану, но не равномерно, так как площади полосок разные. В каждом центре масс полоски следует считать сосредоточенной массу или площадь этой полоски, пропорциональную длине полоски, если ширину полосок выбирать одинаковой.
Затем разобьем треугольник на полоски прямыми линиями, параллельными другой стороне  треугольника. Центры их тяжести в пределе покроют неравномерно медиану
треугольника. Центры их тяжести в пределе покроют неравномерно медиану  . Центры тяжести неоднородных прямолинейных отрезков и
. Центры тяжести неоднородных прямолинейных отрезков и  должны располагаться на этих отрезках, а следовательно, в точке их пересечения
должны располагаться на этих отрезках, а следовательно, в точке их пересечения  , являющейся точкой пересечения медиан треугольника. Эта точка делит медианы в отношении 1 к 2, т. е. если длина медианы равна
, являющейся точкой пересечения медиан треугольника. Эта точка делит медианы в отношении 1 к 2, т. е. если длина медианы равна  , то
, то  ,
,  .
.
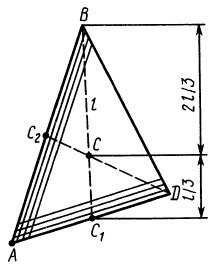
Рис. 92
Дуга окружности
Дуга окружности определяется радиусом  и стягиваемым ею центральным углом
и стягиваемым ею центральным углом  (рис. 93). Она имеет ось симметрии, делящую угол пополам. Центр тяжести находится на оси симметрии дуги, которую примем за ось координат
(рис. 93). Она имеет ось симметрии, делящую угол пополам. Центр тяжести находится на оси симметрии дуги, которую примем за ось координат  . Координату центра тяжести дуги вычисляем по формуле
. Координату центра тяжести дуги вычисляем по формуле
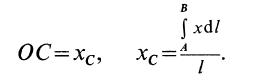
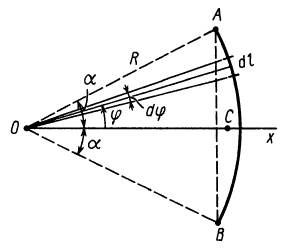
Рис. 93
В рассматриваемом случае

Подставляя эти значения в формулу для  , получим
, получим
Таким образом,

Для полуокружности  . Приняв
. Приняв  , получим:
, получим:
Площадь кругового сектора
Центр тяжести площади кругового сектора с радиусом  и центральным углом
и центральным углом  находится на оси симметрии, принимаемой за ось
находится на оси симметрии, принимаемой за ось  (рис. 94). Разобьем сектор на элементарные треугольники одинаковой величины. Центры тяжести треугольников в пределе при увеличении их числа до бесконечности равномерно покроют дугу окружности радиусом
(рис. 94). Разобьем сектор на элементарные треугольники одинаковой величины. Центры тяжести треугольников в пределе при увеличении их числа до бесконечности равномерно покроют дугу окружности радиусом  .
.
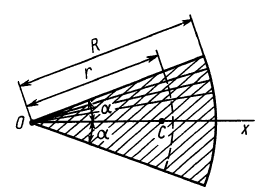
Рис. 94
Используя формулу для центра тяжести дуги окружности, получим
или

Для площади полукруга  ,
,  . При
. При  получим
получим
Объем пирамиды и конуса
Определим положение центра тяжести объема конуса (рис. 95). Для простоты рассмотрим прямой конус, у которого высота является осью симметрии. Высотой конуса является отрезок, соединяющий его вершину  с центром тяжести площади основания
с центром тяжести площади основания  . Выберем начало координат в вершине конуса, а ось
. Выберем начало координат в вершине конуса, а ось  направим по оси симметрии конуса. Тогда центр тяжести объема конуса расположится на оси
направим по оси симметрии конуса. Тогда центр тяжести объема конуса расположится на оси  .
.
Разобьем конус плоскостями, перпендикулярными оси  , на элементарные тонкие диски толщиной
, на элементарные тонкие диски толщиной  и площадью
и площадью  . Все полученные сечения (диски) конуса подобны его основанию. Координату
. Все полученные сечения (диски) конуса подобны его основанию. Координату  центра тяжести объема конуса вычислим по формуле
центра тяжести объема конуса вычислим по формуле
Отношения линейных размеров сечений к соответствующим размерам основания конуса пропорциональны их расстояниям до вершины конуса. Отношения площадей пропорциональны квадратам расстояний. Приняв  , получим
, получим
Учитывая, что
имеем
или

Таким образом, центр тяжести прямого конуса находится на расстоянии  от вершины или
от вершины или  от основания.
от основания.
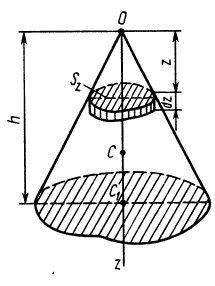
Рис. 95
Это справедливо для объема любого конуса и любой пирамиды, как прямых, так и наклонных, т. е. центр тяжести объема пирамиды или конуса находится на расстоянии  расстояния от центра тяжести площади основания до вершины.
расстояния от центра тяжести площади основания до вершины.
Объем полушара
Полушар имеет ось симметрии, которую примем за координатную ось  (рис. 96). Разобьем объем полушара на элементарные диски толщиной dx и радиусом у, который является координатой точки окружности, которая получилась от пересечения полушара с координатной плоскостью
(рис. 96). Разобьем объем полушара на элементарные диски толщиной dx и радиусом у, который является координатой точки окружности, которая получилась от пересечения полушара с координатной плоскостью  . Уравнение этой окружности
. Уравнение этой окружности
где  — радиус полушара. Для координаты центра тяжести объема полушара имеем
— радиус полушара. Для координаты центра тяжести объема полушара имеем
где  — координата центра тяжести элементарного диска. Объем полушара
— координата центра тяжести элементарного диска. Объем полушара
Объем элементарного диска

так как радиус диска  . Выполняя интегрирование в пределах от
. Выполняя интегрирование в пределах от  до
до  , получим
, получим
Таким образом, центр тяжести объема полушара находится от его центра на расстоянии

Это расстояние меньше половины радиуса полушара.
Рис. 96
Задача №1
Определить координаты центра тяжести площади плоской фигуры, имеющей размеры, указанные на рис. 97.
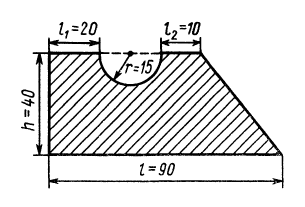
Рис.97
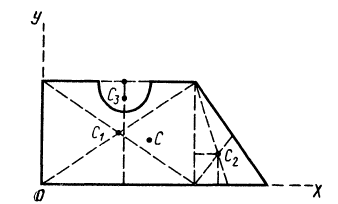
Рис. 98
Решение. Присоединим к заданной фигуре дополнительно полукруг 3 и разобьем полученную фигуру на прямоугольник 1 и треугольник 2. Получили три фигуры, две из которых имеют положительные площади (прямоугольник 1 и треугольник 2) и одна — отрицательную (полукруг 3). В выбранной системе координат для координат центра тяжести заданной фигуры имеем

где  — координаты центров тяжести отдельных фигур;
— координаты центров тяжести отдельных фигур;  — площади этих фигур.
— площади этих фигур.
Вычислим площади и координаты центров тяжести отдельных фигур, учитывая рис. 98 Имеем:
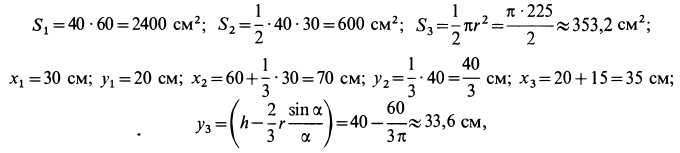
так как  .
.
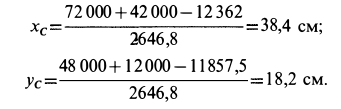
Подставляя полученные значения в (а), получим:
Центр тяжести плоской фигуры
постановка задачи. Найти площадь и координаты центра тяжести плоской фигуры.
План решения:
1. Разбиваем фигуру на простые отдельные части, положение центров тяжести которых известны.
2. Выбираем систему координат. Вычисляем площади и координаты  центров тяжести отдельных частей. Площади вырезанных частей берем со знаком минус.
центров тяжести отдельных частей. Площади вырезанных частей берем со знаком минус.
3. Находим общую площадь фигуры по формуле 
4. Определяем координаты центра тяжести фигуры:
Задача №2
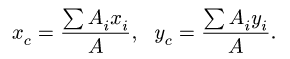
Найти площадь и координаты центра тяжести плоской фигуры. Криволинейный участок контура является половиной окружности с центром на оси Ох (рис. 74). Размеры на рисунке даны 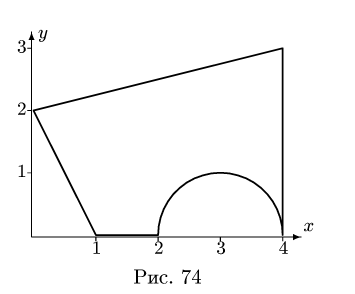
Решение
1. Разбиваем фигуру на простые отдельные части, положение центров тяжести которых известны.
Центр тяжести прямоугольника находится в его геометрическом центре, положение центра тяжести других фигур, встречающихся в задачах, изображено на рис. 75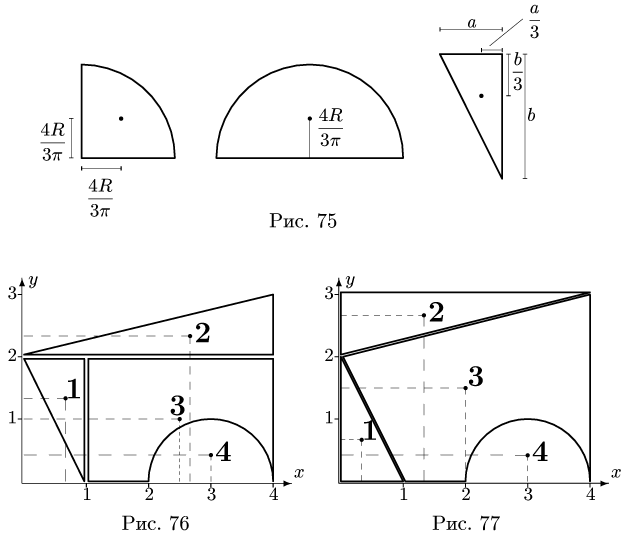
Представляем фигуру в виде двух треугольников 1,2, прямоугольника 3 и выреза 4 в виде полукруга (рис. 76).
2. Вычисляем площадь (в  ) и координаты центра тяжести (в м) каждого элемента:
) и координаты центра тяжести (в м) каждого элемента: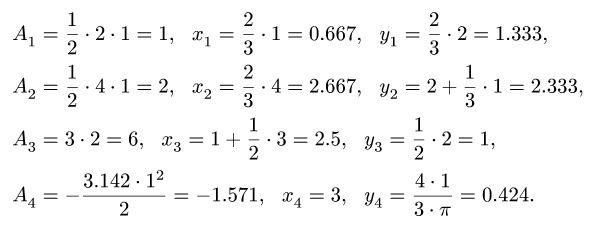
Площадь выреза берем со знаком минус.
3.Площадь фигуры 
4. Находим координаты центра тяжести всей фигуры:

Вычисления удобно свести в таблицу: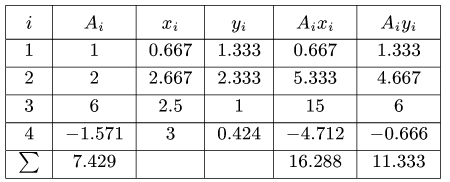
Сначала заполняем столбцы  затем вычисляем статические моменты
затем вычисляем статические моменты  Внизу записываем суммы столбцов, необходимые для вычисления координат центра тяжести. Таким образом
Внизу записываем суммы столбцов, необходимые для вычисления координат центра тяжести. Таким образом

Замечание 1. Большинство задач на определение центра тяжести допускает несколько способов разбиения фигуры. Это можно использовать для проверки решения. Второй вариант разбиения фигуры в данном примере состоит из прямоугольника 3 с размерами  и вырезанных из него полукруга 4 и двух треугольников 1 и 2 (рис. 77).
и вырезанных из него полукруга 4 и двух треугольников 1 и 2 (рис. 77).
Замечание 2. Решение задачи в системе Maple V методом контурного интегрирования.
- Заказать решение задач по теоретической механике
Пространственная стержневая система
Постановка Задачи. Найти координаты центра тяжести пространственной фигуры, состоящей из N однородных стержней.
План решения:
1. Разбиваем фигуру на отдельные стержни.
2. Выбираем систему координат. Вычисляем длины и координаты  центров тяжести отдельных стержней. Координаты центра прямолинейного однородного стержня вычисляем как полусумму координат его концов.
центров тяжести отдельных стержней. Координаты центра прямолинейного однородного стержня вычисляем как полусумму координат его концов.
3. Находим суммарную длину стержней системы 
4. Определяем координаты центра тяжести тела по формулам

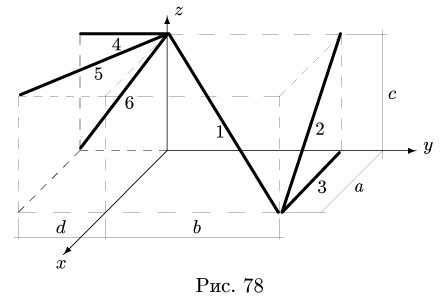
Задача №3
Найти координаты центра тяжести пространственной фигуры, состоящей из шести однородных стержней (рис. 78). Даны размеры:
Решение
1. Разбиваем фигуру на шесть стержней.
2. Выбираем систему координат (рис. 78). Вычисляем длины и координаты  центров тяжести отдельных стержней.
центров тяжести отдельных стержней.
3. Находим суммарную длину стержней системы:
Промежуточные результаты удобно занести в таблицу:
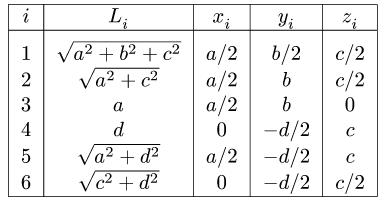
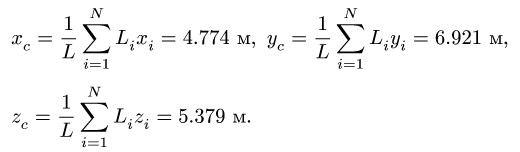
4. Определяем координаты центра тяжести тела по формулам
Постановка задачи. Найти координаты центра тяжести однородного объемного тела.
План решения:
1. Разбиваем тело на простые части, положение центров тяжести которых известно.
2. Выбираем систему координат. Вычисляем объемы  и координаты
и координаты  центров тяжести отдельных частей. Объемы вырезанных частей берем со знаком минус.
центров тяжести отдельных частей. Объемы вырезанных частей берем со знаком минус.
3. Находим общий объем тела по формуле 
4. Определяем координаты центра тяжести тела:

Задача №4
Найти координаты центра тяжести однородного объемного тела (рис.79);
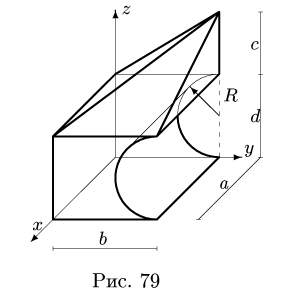
Решение
1. Разбиваем тело на пирамиду 1, параллелепипед 2 и половину цилиндра 3 (рис. 80).
2. Выбираем систему координат. Вычисляем объемы  и координаты
и координаты  центров тяжестей отдельных частей. Центр тяжести пирамиды 1 лежит в точке
центров тяжестей отдельных частей. Центр тяжести пирамиды 1 лежит в точке 

Центр тяжести параллелепипеда 2 совпадает с его геометрическим центром:

Объем половины цилиндра 3 берем со знаком минус:

где  — расстояние по оси у от оси цилиндра до его центра тяжести
— расстояние по оси у от оси цилиндра до его центра тяжести  .
.
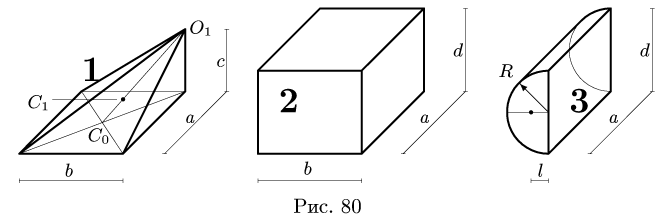
3. Находим общий объем тела:

 В общем случае объем тела, лежащего в области
В общем случае объем тела, лежащего в области  можно найти, вычисляя тройной интеграл по области
можно найти, вычисляя тройной интеграл по области  а координаты центра тяжести, например,
а координаты центра тяжести, например,  однородного тела можно определить по формуле
однородного тела можно определить по формуле  см.
см.
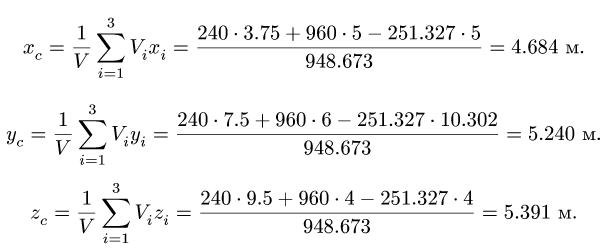
4. Определяем координаты центра тяжести тела:
Центр тяжести
Центр тяжести — точка, через которую проходит линия действия равнодействующей элементарных сил тяжести. Он обладает свойством центра параллельных сил. Поэтому формулы для определения положения центра тяжести различных тел имеют вид:
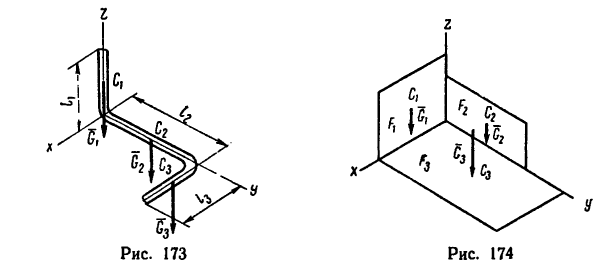
Если тело, центр тяжести которого нужно определить, можно отождествить с фигурой, составленной из линий (например, замкнутый или незамкнутый контур, изготовленный из проволоки, как на рис. 173), то вес  каждого отрезка
каждого отрезка  можно представить в виде произведения
можно представить в виде произведения
где d — постоянный для всей фигуры вес единицы длины материала.
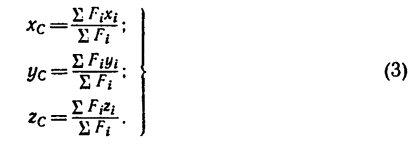
После подстановки в формулы (1) вместо  их значений
их значений  постоянный множитель d в каждом слагаемом числителя и знаменателя можно вынести за скобки (за знак суммы) и сократить. Таким образом, формулы для определения координат центра тяжести фигуры, составленной из отрезков линий, примут вид:
постоянный множитель d в каждом слагаемом числителя и знаменателя можно вынести за скобки (за знак суммы) и сократить. Таким образом, формулы для определения координат центра тяжести фигуры, составленной из отрезков линий, примут вид:
Если тело имеет вид фигуры, составленной из расположенных различным образом плоскостей или кривых поверхностей (рис. 174),
то вес каждой плоскости (поверхности) можно представить так:

где  — площади каждой поверхности, ар — вес единицы площади фигуры.
— площади каждой поверхности, ар — вес единицы площади фигуры.
После подстановки этого значения в формулы (1) получаем формулы координат центра тяжести фигуры, составленной из площадей:
в формулы (1) получаем формулы координат центра тяжести фигуры, составленной из площадей:
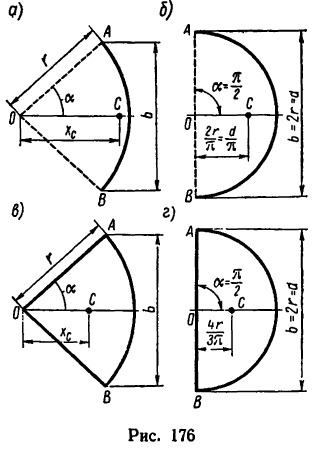
Если же однородное тело можно разделить на простые части определенной геометрической формы (рис. 175), то вес каждой части

где  — объем каждой части, а у — вес единицы объема тела.
— объем каждой части, а у — вес единицы объема тела.
После подстановки значений  в формулы (I) получаем формулы для определения координат центра тяжести тела, составленного из однородных объемов;
в формулы (I) получаем формулы для определения координат центра тяжести тела, составленного из однородных объемов;
При решении некоторых задач на определение положения центра тяжести тел иногда необходимо знать, где расположен центр тяжести дуги окружности, кругового сектора или треугольника.
Если известен радиус дуги г и центральный угол 2а, стягиваемый дугой и выраженный в радианах, то положение центра тяжести С (рис. 176, а) относительно центра дуги О определится формулой
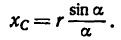

Если же задана хорда  дуги, то в формуле (5) можно произвести замену
дуги, то в формуле (5) можно произвести замену
и тогда

В частном случае для полуокружности обе формулы примут вид (рис. 176, б)
Положение центра тяжести кругового сектора, если задан его радиус r (рис. 176, в), определяется при помощи формулы

Если же задана хорда сектора, то

В частном случае для полукруга обе последние формулы примут вид (рис. 176, г)

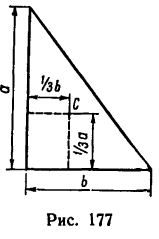
Центр тяжести площади любого треугольника расположен от любой стороны на расстоянии, равном одной трети соответствующей высоты.
У прямоугольного треугольника центр тяжести находится на пересечении перпендикуляров, восставленных к катетам из точек, расположенных на расстоянии одной трети длины катетов, считая от вершины прямого угла (рис. 177).
При решении задач на определение положения центра тяжести любого однородного тела, й составленного либо из тонких стержней (линий), либо из пластинок (площадей), либо из объемов, целесообразно придерживаться следующего порядка:
- выполнить рисунок тела, положение центра тяжести которого нужно определить. Так как все размеры тела обычно известны, при этом следует соблюдать масштаб;
- разбить тело на составные части (отрезки линий или площади, или объемы), положение центров тяжести которых определяется исходя из размеров тела;
- определить или длины, или площади, или объемы составных частей;
- выбрать расположение осей координат;
- определить координаты центров тяжести составных частей;
- найденные значения длин или площадей, или объемов отдельных частей, а также координат их центров тяжести подставить в соответствующие формулы и вычислить координаты центра тяжести всего тела;
- по найденным координатам указать на рисунке положение центра тяжести тела.
- Кинематика точки
- Плоское движение твердого тела
- Мгновенный центр скоростей
- Мгновенный центр ускорений
- Условия равновесия системы сил
- Плоская система сил
- Трение
- Пространственная система сил